





焊接机器人视觉识别参数对比
时间:2017-11-28
阅读:9097

焊接机器人视觉识别参数对比
机器人视觉自20世纪50年代经过了六十多年的发展,其应用已十分广泛,它是一门交叉学科,综合了图像处理、计算机图形、模式识别、人工智能以及心理学等多个学科,其研究目的就是通过图像来建立真实世界模型,在机械上实现人类的视觉功能。其中,图像处理又包括图像的采集和数字化、图像变换、预处理、分割、灰度分析等多个方面的研究
视觉传感系统按照有无外加的辅助光源来分类,可分为主动视觉和被动视觉。所说的被动视觉是在自然光或者是弧光照明下采集图像。而主动视觉传感是将激光等辅助光源照射在工件上,通过摄像机采集反射的结构光,获取图像信息,它们详细对比如表1.1。
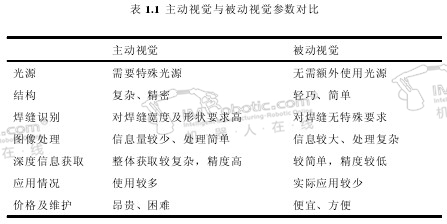
机器视觉的应用使焊接技术的精度和适应性得到大幅提高。主动视觉法主要以激光作为主动光源,通过三角测量获取焊缝的三维信息。被动视觉法则不需要辅助光源,直接通过双目视差原理计算得到焊缝的三维信息。
如图1.3所示为结构光的原理图。激光发生器射出的激光通过透镜形成线型光带,投射到焊件表面上,反射后经过滤光片进入到视觉传感器成像,经过图像处理提取坡口表面的轮廓信息和和特征点以及对应的空间坐标,用于焊缝的定位和纠偏。采集的原始图像有工件表面杂质和反光等带来的干扰,需要先进行滤波等图像预处理去除干扰,然后提取焊缝形状轮廓。

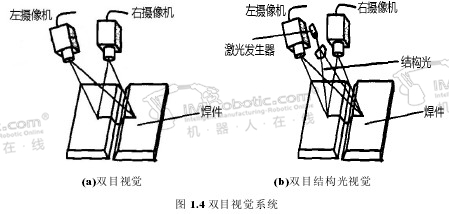
双目传感器可分为两种形式,即单目双位和固定双目。如图1.4 (a)左右摄像头分别获得相同区域的图像,通过对图像进行处理获得特征信息,然后匹配左右图像特征,通过双目极线法求得特征点的三维信息。为了提高焊缝的三维信息的精度,可采用结构光配合双目立体视觉的测量方法,如图1.4 (b)所示。用两台摄像机同时获取结构光照射在待识别区域上反射的光线。由于激光具有单色性、高能性,可以使图像处理的精度大大提高,从而获得更高精度的三维焊缝信息。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









