





焊接机器人焊缝图像梯度直方图阈值分割
时间:2017-11-29
阅读:8223

焊接机器人焊缝图像梯度直方图阈值分割

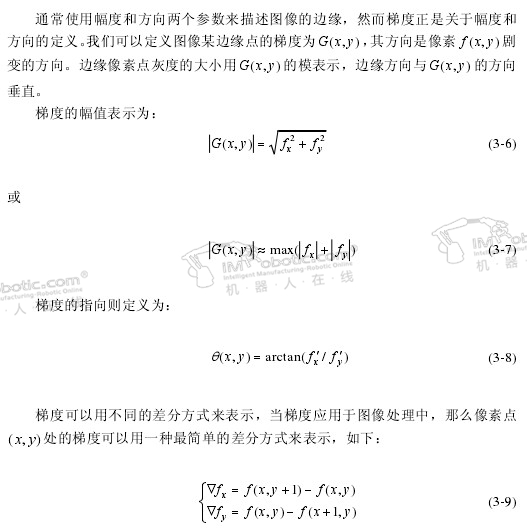
经过分析图像的灰度图,可以很容易得到图像中沿边缘的灰度值变化比较平缓,相反在与边缘垂直的方向上灰度值减小非常大。将图像离散的像素点近似看成连续的曲线,则,边缘处灰度的一阶导数比较大,二阶导数为零,在零点附近会有一个正值波峰和一个负值波峰,简而言之,就是边缘点的一阶导数梯度幅值最大,二阶导数为零。所以,找到图像梯度的一阶导数的最大值或者二阶导数的零点是提取图像边缘的有效方法
实际上,图像边缘信息只占图像信息的很小部分,判断一个像素点是不是边缘点,只要是根据其附近像素点灰度值的大小变化,通常边缘点的灰度值与其附近像素点的灰度值相差最大,或者说灰度值梯度幅值最大的点;另外边缘还具有一定的方向。根据数字图像的特点,每个像素都有8个邻域点,将这些邻域点分为4个方向:水平、竖直、45°和135°方向,按照顺时针方向可以分别记为2, 3, 4,如图3.2所示。
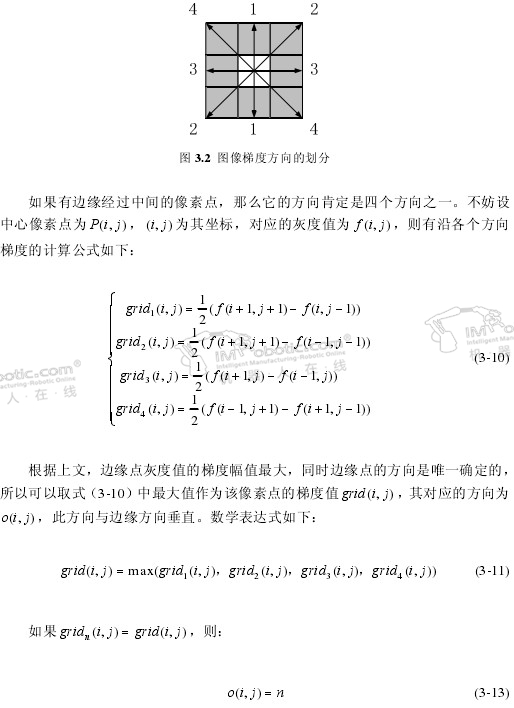
结合式(3-11)和(3-13)就可得到所有像素点的最大梯度,所有的grid (i, j)组成最大梯度幅值集合,及其对应的方向集合。这种处理梯度方向的方法将传统梯度的计算由二维降到一维,大大提高了梯度计算速度,与此同时该梯度计算方法不需要对梯度的方向另行计算,所以对图像处理效率的提高具有很积极的作用。
在常用的图像灰度直方图中,峰值的情况不稳定,容易出现非单峰的情况如图3.3 (a),影响图像峰中闽值的设置。然而图像的梯度直方图中只会出现一个峰值如图3.3 (b)图像梯度直方图的这种性质非常利于图像分割闽值的选定。
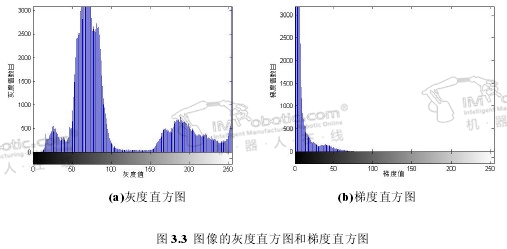
根据图像梯度的意义,可以知道梯度值较小的像素点表示图像中灰度值变化较小的区域,该区域为原图中绝大部分,相反梯度值较大的像素点表示原图中的边缘部分。
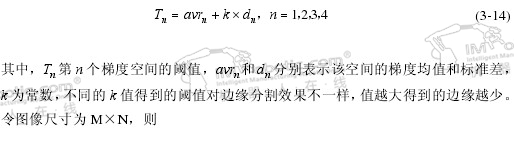
在统计学中,平均值常常是描述统计量的总体信息,标准差则是描述目标和总体的偏离程度。可以将其应用于梯度闽值自适应选定,经过验证其具有很好的效果。将这种方法一般化,应用于图像分割中梯度的全局闽值的选定,达到分割图像边缘的效果,可以将其表达成下述数学模型:
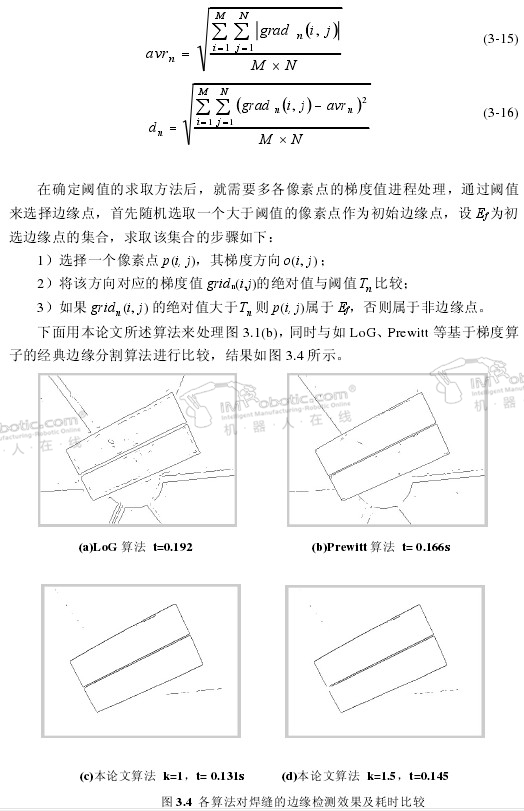
由上图可以看出,对焊件边缘提取,Prewitt算法要好于LoG算法的效果,LoG算法对图像的的噪声非常敏感,对非焊缝边缘的尺度把握不好。同时这两种算法对闽值选择的要求比较高,闽值选取的不同对处理结果影响很大。本论文算法中引入统计量,并用于梯度阀的值选取,该方法在处理不同的图像时具有很好的自适应性,并且经验常数k在较小范围内的变化对图像处理效果影响非常小,如图3.4中的(c), (e)所示,分析图像已知本论文图像分割方法具有鲁棒性。上述对比的算法均在同一台计算机上运行,可以看出本论文方法在运算效率上也要优于其他两种典型算法。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
19

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









