





移载码垛机器人光源选择和摄像机选择
时间:2017-12-11
阅读:6962

移载码垛机器人光源选择和摄像机选择
2 光源选择
良好的光照,对于图像的采集起着至关重要的作用,其照明的效果将直接影响所采集图像的质量,是后续图像处理的先决条件。
加入光源的主要目的有以下几个:①增强待测目标的特征信息;②弱化待测目标物体周边不需要的特征以及噪声的干扰;③不会加入其它的干扰。通过加入光源,有助于用户获取目标物体的高品质、高对比度图像。根据照明方式的不同,光源可分为以下几种:
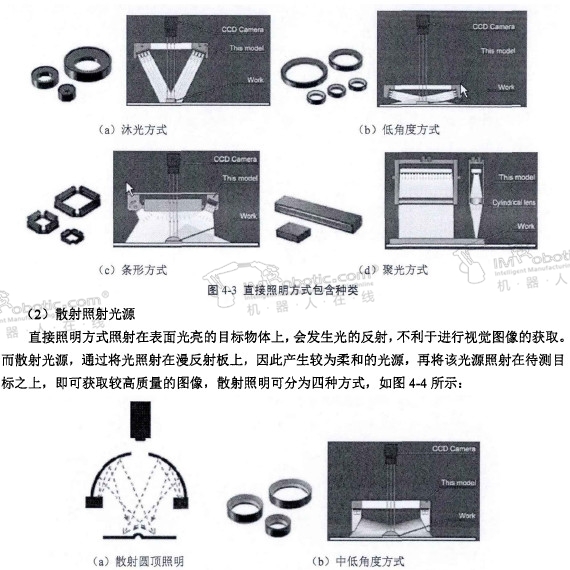
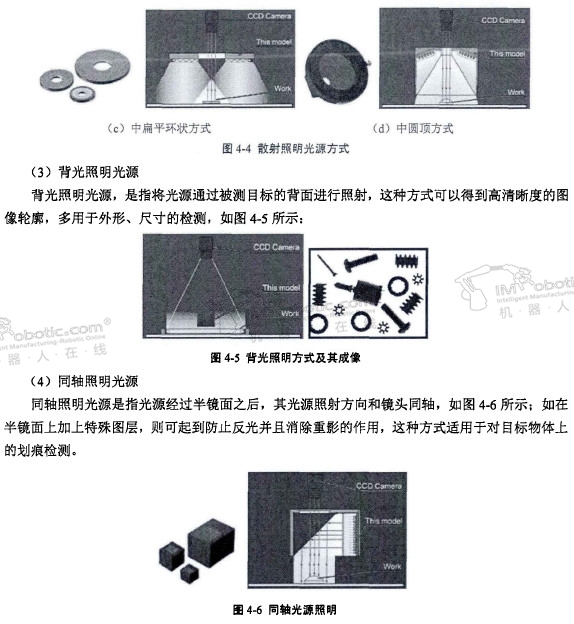
(1)直接照明光源
将光源直接照在待测目标之上,该方式具有照明区域集中、亮度较高、并且安装简便、容易实现等特点。常见的直接照明方式如图4-3所示:
根据现场实际的情况选择合适的光源,由于我们视觉应用的情况比较简单,所以在这里我们就选择简单的直接照明光源进行照明即可,在光线条件较好的环境下,直接利用自然光也可实现视觉的应用。
3 摄像机选择
光源选择好之后,接下来就是选择相机了;CCD, CMOS, USB等都是现在最常使用的相机。
我们用所成像的水平与垂直两个方向上的所有像素数来表示相机的分辨率,比如1027×768 ;分辨率的高低将直接影响成像效果的好坏,分辨率的值越大,就说明图像越清晰,细节表现的就更加具体,同时所形成的图像文件也就随之增大。与相机分辨率相关的参数就是视场(Field of View)与特征分辨率(Feature Resolution )。视场指的是相机所能拍摄到的场景的具体范围,而特征分辨率指的是能够分辨出的实际场景中的物理尺寸,如图4-7所示:
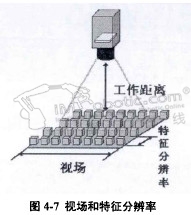
依据NI Vision Module中关于图像算法的要求,用两个像素来表示目标的最小特征,利用视场与相机分辨率,我们能够计算出特征分辨率。其计算公式如下:
特征分辨率=视场/分辨率×2
根据相机的图像传输方式,对相机进行分类,可分为模拟相机与数字相机。
(1)模拟相机
模拟相机是以模拟电平的形式来表示图像信号的。其应用现在已经非常广泛了,而且技术成熟、相对价格比较便宜。模拟相机具有以下四个应用标准,如表4-2所示。
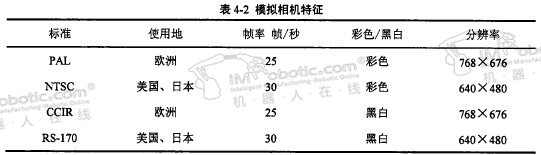
由表4-2可知,采用的标准不同所对应的参数也不同,只有通过这些参数,图像采集卡才可以获取正确的图像信息。
当然模拟相机也存在着不足之处,如分辨率不高、帧率不高,所以其在机器视觉应用中不能用于高速和高精度的应用,因此这里不适用模拟相机进行图像的采集。
(2)数字相机
数字相机是先将获取的图像进行数字化,再通过数字接口传输至计算机之中。常用的数字接口有Firewire, CameraLink, Gige以及USB。相较于其他几种数字接口应用和配置的繁琐和复杂,USB摄像头的简便易用,易于实现,使得它在视觉应用中特别适合一些简单的视觉应用的研究。
在视觉改进方案中,就是因为USB摄像头的便捷性、实用性以及易操作和掌握,并且USB摄像头同时能够满足机械视觉应用的基本需求,同时其在价格十分便宜,因此本文采用USB摄像头和Labview视觉平台,共同组成一种简单的机器视觉系统;这种系统搭建十分方便,只需要一台计算机(其上具有Labview软件及1VI Vision视觉组件)和一个普通USB摄像头即可完成视觉系统的搭建,不需要占用很大的空间,而且方便视觉应用的学习和研究。
在这里我们所使用的USB摄像头就是常用的普通摄像头,如图4-8所示,它的分辨率为640×480;


机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









