





码垛机器人编码器和光栅尺传感器
时间:2017-12-11
阅读:11797

码垛机器人编码器和光栅尺传感器
3 编码器和光栅尺传感器
系统中加入机器视觉后,根据系统改进方案,为实现控制系统的闭环控制,同时为了保证运动控制系统的定位精度和运行的稳定性和可靠性,在系统中引入编码器与光栅尺传感器,实现在运动控制过程当中对指令运行情况与机构运行当前位置信息的实时反馈,确保码垛机的精确定位,同时实现控制系统的闭环改进。
1 编码器
编码器(encoder)与伺服电机的转动轴连接,是用于对电机的运行数据进行实时处理以及将数据反馈给控制器(闭环控制)或伺服驱动器(半闭环控制)的一种设备,如图4-9所示;编码器的工作原理:是将电机的角位移或者直线位移通过编码器转换成相应的电信号,再将电信号转换成为相应的脉冲,用脉冲的数量来表示相应位移的大小,从而反应出系统的当前运行距离或角度的具体情况,这里的位移(角度)是指运动指令所发出的指令信息,但是并不能反应出系统所在的当前位置;这里我们将编码器与控制器PLC进行连接,实现整个控制系统的闭环反馈,保证当前运动指令发出的位移的完成。
整个码垛控制系统中,共有三组伺服电机,在每个伺服电机末端都连接有一个编码器,根据编码器的功能,通过I/O口,将编码器的A相、B相和控制器PLC中的两个高速记数器相连接,通过PLC的高速计数器可对当前控制器发送给伺服电机的脉冲数进行记数,并通过相应的脉冲与电机实际运转角度,脉冲与X,Y,Z各轴运行距离之间的转换关系,来反应电机所运行的角度与位移,用于反馈当前所执行的运动控制指令是否完成,实现闭环控制。

2 光栅尺传感器
在码垛机运行过程中,如发生滑齿等现象时,系统的控制指令发出的脉冲得到执行,编码器也能够检测到相应的脉冲数,可是机构运行的当前位置会发生偏移,这是原有系统所检测不到的。为防止这种现象,在改进方案中引入光栅尺传感器。
光栅尺传感器是一种位移传感器,是通过光栅的光学原理,来测量码垛机在运动过程中各轴所在的当前位置,是一种测量位置的反馈设备,如图4-10所示;光栅尺传感器主要用在运动控制系统的闭环控制当中,可以对机构运动的直线位移或者角位移进行测量,将测量信号传递给控制器,即可实现运动控制的闭环控制,使得整个控制系统的定位精度大大提高。在码垛机器人的三轴中加入光栅尺传感器,实现当前位置的实时反馈,确保机构能够正确运行指令所发出的位移信息,实现系统的闭环反馈控制。

4 基于视觉系统的码垛机模型构建
基于视觉系统的模型如图4-11所示:
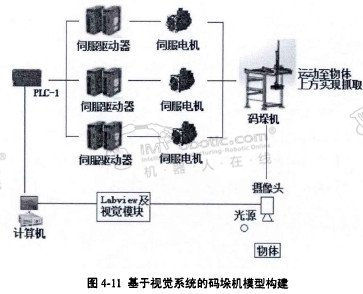
由摄像头拍摄需要抓取物体的图像;由于采用USB摄像头,所以图像直接采集传输至计算机,在计算机上通过Labview软件实现对图像信息的处理和分析,得到物体需要测量的特征点的坐标信息,经过相应的算法计算得到实际物体的中心坐标:将Labview软件与PLC之间进行通信,实现数据信息的传递,将得到的坐标信息传送给PLC,通过PLC控制三组伺服驱动器和电机运动,实现对物体的抓取、搬运,最终完成码垛任务。
本章主要对之前码垛控制系统中存在的问题提出改进方案设计:加入编码器和光栅尺传感器实现当前运动指令与位置信息的反馈,同时引入机器视觉,实现简单的手眼协调功能,提高码垛机器人的适应性与智能化,最终完成控制系统的闭环控制改进。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









