





码垛机器人腰部、底座结构简介
时间:2017-12-18
阅读:21416

码垛机器人腰部、底座结构简介
码垛机器人腰部的描述
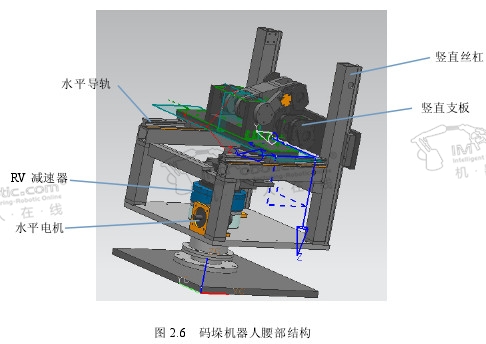
码垛机器人腰部结构主体机架采用方钢管型材搭建而成,腰部的旋转动力是由伺服电机提供。为了克服底座部分旋转时的惯量,同时考虑到码垛机器人需要具有较高的传动精度,所以要采用机器人常用的RV减速器,该种减速器有占用空间小、误差低、质量小等特点。腰部的伺服电机和减速器都安装在腰部机架上,将电机外壳与腰部机架相连作为转动部分。建立好的腰部装配三维模型见图2.6:
码垛机器人底座结构描述
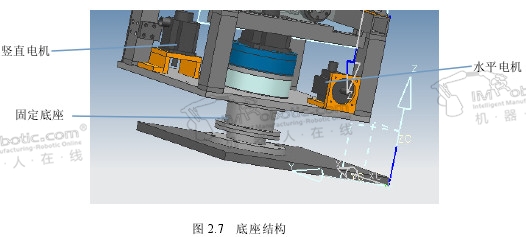
电机轴与固定底座相对静止,这样可以降低机器人整体的高度并且减小机身整体对底座轴的倾翻力矩。为了保证传动的精度并且便于装配,减速器与底座转轴之间采用法兰的连接方式。具体结构如图2.7所示。
2.4.7码垛机器人各连杆的基本尺寸
依据课题组设计的码垛机器人腰部机架的总体结构和尺寸,我们可以初步确定出手臂部分的基本尺寸。根据结构简图2.5中所示的各连杆符号,各连杆的基本尺寸见表2.1所示:

码垛机器人整体结构图
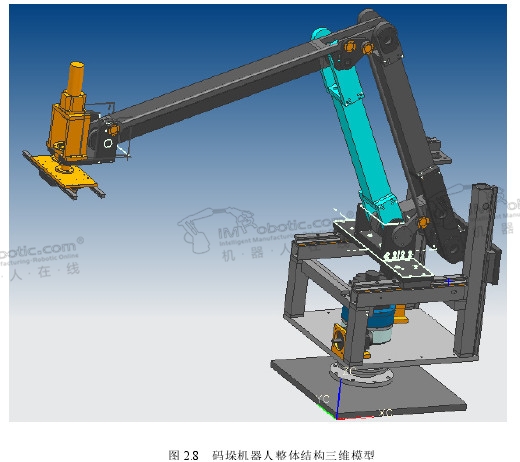
具体方案为腰身部分包括与地面相连的固定底座,安装在该底座上并可绕竖直轴旋转的腰部机架。手臂的主体部分由一组平行四杆机构组成,包括下方小臂、上方大臂、前臂和后臂,还包括另外两个辅助的平行四边形机构,即末端姿态保持器。除此以外,还有连接在上方大臂末端的腕部和手爪部分,其整体结构完成三维模型的建立后如图2.8所示。
在本章中首先简述了码垛的作业要求,所需的码垛形式并对已有的码垛机器人进行了详细描述,其中包括码垛机器人的整体结构描述以及手爪、腕部、腰部、手臂各部分描述。对三维造型软件UG进行了简明扼要地介绍,并运用这款软件对饲料码垛机器人建立起虚拟样机模型。此外,还对机械结构中执行末端的姿态保持机构的工作原理和作用进行了简述和证明。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









