





码垛机器人结构各关键节点介绍
时间:2017-12-18
阅读:12787

码垛机器人结构各关键节点介绍
根据厂商对饲料袋的抓取要求和托盘码放的特点,在堆码过程中手爪需要改变位置和姿态来适应码垛形式,介于以上的种种要求,我们课题组设计出了一款腕部、腰部可进行转动,手爪竖直、水平方向可以移动的四自由度码垛机器人。
码垛机器人手爪部分设计
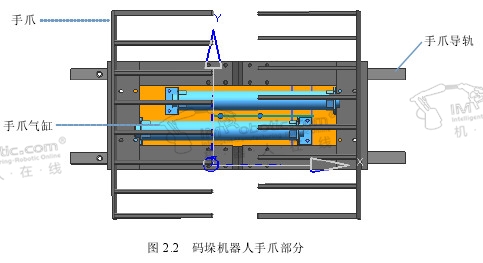
依据厂商提供的饲料袋尺寸(600mm×800mm×200mm,我们可以分析得出码垛机器人手爪的设计尺寸。机器人手爪合并时两爪侧板之间的宽度不小于600mm,并且手爪打开之后两指尖的距离不小于600mm,又为了避免饲料袋发生侧翻等情况的发生,手爪长度方向应该不小于700mm。
手爪张合动作是利用两个气缸杆推动手爪同时向两个相反方向运动,两个双作用气缸采用反方向相互交错两端固定的安装方式。气缸的前后两侧装有两组平行导轨。气缸杆与手爪的连接处采用浮动接头的设计方式,这样一来可以减少因装配精度造成的气缸磨损。同时由于所要码垛的物体为软包饲料袋,为了防止饲料袋被指尖刮破,指尖处需要做倒圆角处理。手爪的详细三维模型见图2.2所示。
码垛机器人腕部结构的描述
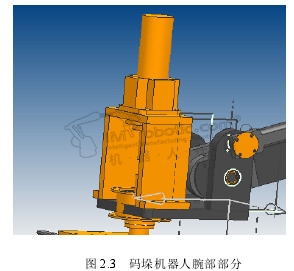
码垛机器人腕部采用伺服电机加减速器的结构与手爪转轴通过法兰相连接。腕部的主要作用就是通过电机带动手爪的周向转动来调整具体饲料袋的摆放角度。腕部的详细三维模型见图2.3所示。
码垛机器人手臂结构描述
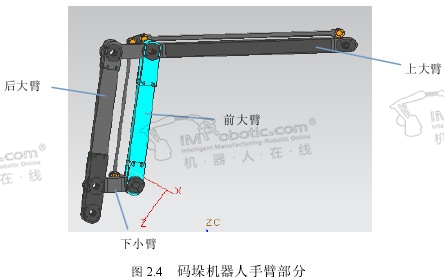
关于码垛机器人手臂的主体部分设计,其中上大臂与下小臂,前臂和后臂分别平行,这样就构成了传统的平行四连杆结构。水平丝杠和竖直丝杠两端均固定在码垛机器人腰部机架上,两端采用圆锥滚子轴承面对面安装。水平与竖直运动分别通过伺服电机由同步带使水平和竖直丝杠转动,然后通过丝杠将电机轴的旋转运动转变成末端的直线移动。后大臂由竖直丝杠螺母牵动,最终在末端转换成为纵向运动。水平丝杠螺母牵动前大臂运动,最终转换成为手爪的水平运动。为了保证运动的平稳性并且承载手臂部分的重力,在机架上固定两组分别与竖直和水平丝杠平行的直线导轨。这样设计就可以使伺服电机带动高惯量载荷并完成准确的定位。关于手臂部分详细的三维模型如图2.4所示。
执行末端主要部件姿态保持器的简介
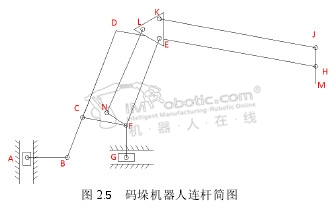
上图即为饲料码垛机器人的姿态保持器结构简图,它由四组连杆NFG, NL, LKE,KJ构成,其主要作用是使执行末端(即手部)始终与水平面垂直,保持执行末端的姿态不变。
以上所述姿态保持装置由2组平行四连杆结构构成,具体形式见图2.5。在上大臂与前大臂交汇点连接轴E处安装有一个类“L”形连杆LEK。其中一组平行四边形NLEF由连杆NF, NL, LE, EF构成,另一组平行四边形KEHJ由连杆KE, KJ, HE,川构成。
接下来将证明按照上述的设计方式,也就是利用所述第一、二平行四连杆机构组成的姿态保持器能够保证所述执行末端在工作过程中姿态保持不变
根据几何位置关系FG垂直地面,由于NFG为一个连杆,所以NF与FG所成夹角保持不变。又因为LE//NF,所以LE与FG所成夹角也不变。由于KE与LE所成角度不变,并且JH //KE,所以JH与FG所成角度不变。因此若KE//F G,则运动过程中JHM一直与地面相垂直,即末端执行器的姿态没有发生变化。在码垛机器人中加入姿态保持机构可以减少一个动力源的使用。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









