





码垛机器人动力学模型
时间:2017-12-18
阅读:7771

码垛机器人动力学模型
拉格朗日法求解动力学模型
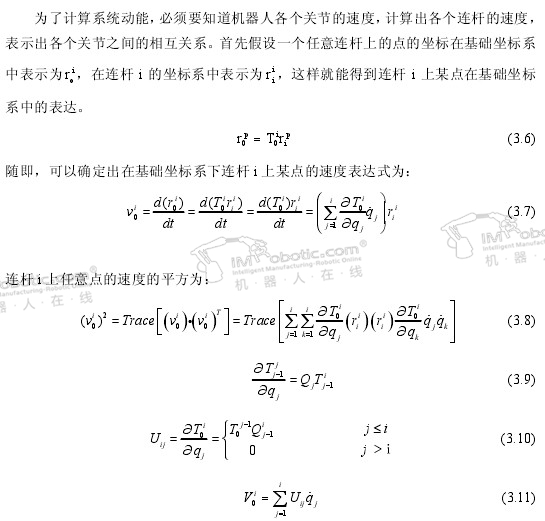
在本节开始对码垛机器人进行动力学问题分析以前,我们先要了解一下拉格朗口法的主要研究过程
(1)求取所有连杆上各个点的速度。
(2)求取单一连杆的动能,然后算出它的总体动能。
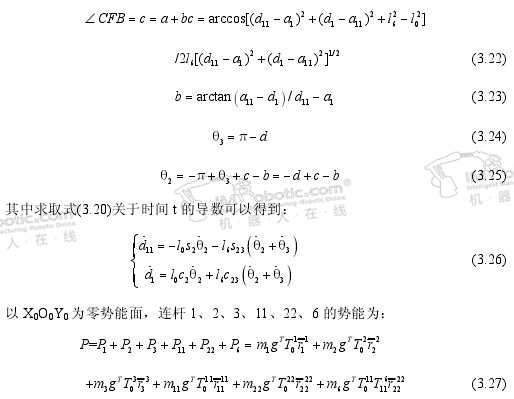
(3)求取单一连杆的势能,然后算出它的总体势能。
(4)求解出码垛机器人的拉格朗口方程表达式。
(5)对拉格朗口函数进行求导,得出最后动力学的表达式方程。
具体表达式上文已经给出:


码垛机器人动力学模型
在对本文所介绍的饲料码垛机器人进行动力学分析时,为减少计算量可以先略去手爪部分的回转运动。由于该码垛机器人的连杆系统比较复杂,放在一个坐标系下求解计算量较大,故将其分为两部分进行求解:一部分是四连杆机构,另一部分是旋转底座。
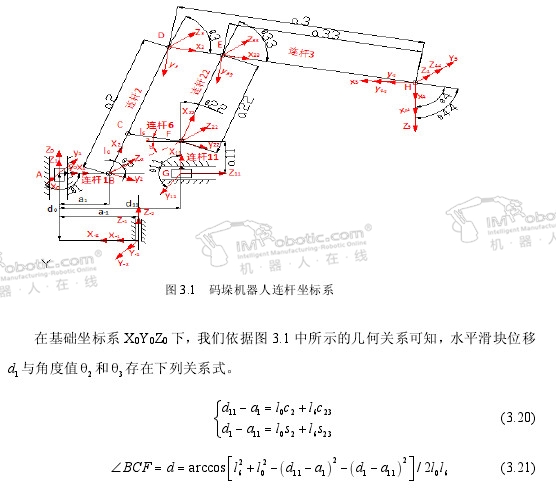
简化后,连杆坐标系见图3.1
四连杆部分动力学模型
四连杆机构的两个力矩输入端与腰部底座的旋转力矩无关,所以可以与腰部转矩分开计算。故本节进行的所有论证均是在手臂基础坐标系X0Y0Z0下完成的。
原有码垛机器人的模型过于复杂,我们为了方便求取其数学模型需要对连杆进行适当地化简。
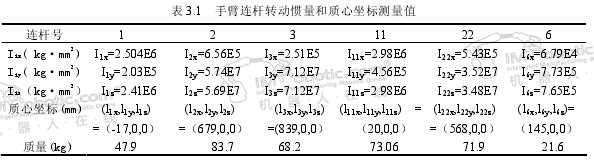
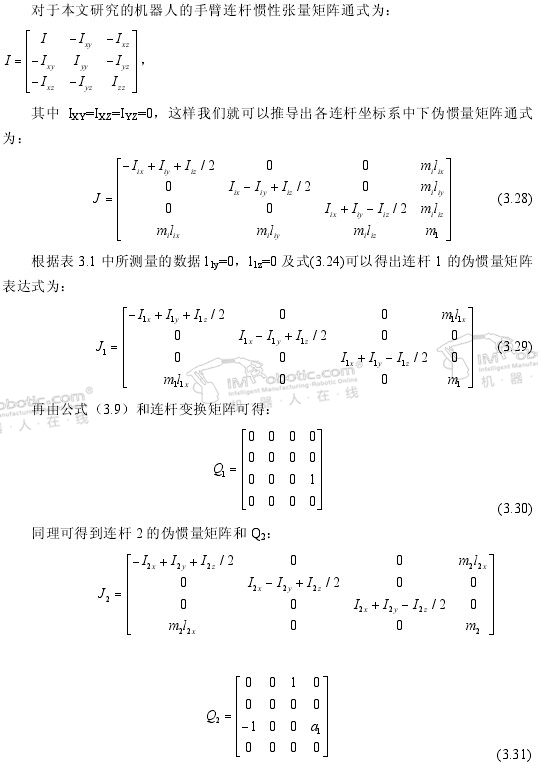
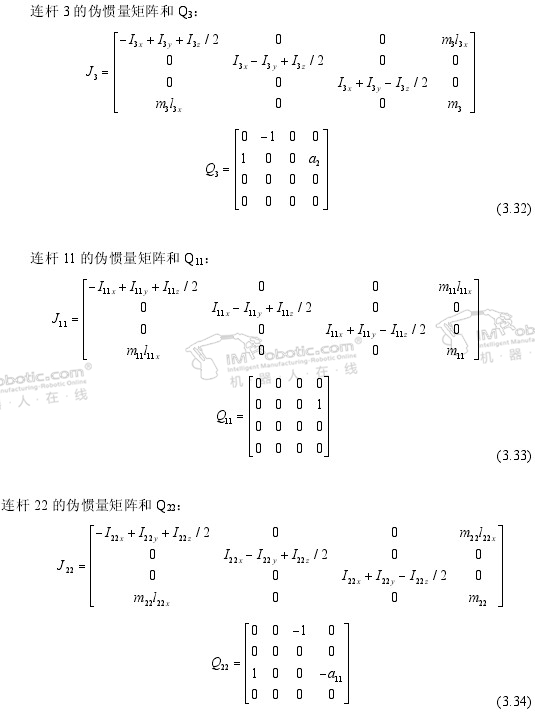
为了尽可能提高数学模型的精确性和合理性,各连杆在其自身坐标系中沿各坐标轴的转动惯量和质心坐标值均使用UG三维模型中的测量值。对于手臂连杆的转动惯量及质心坐标进行测量后得到如表3.1所示的结果:



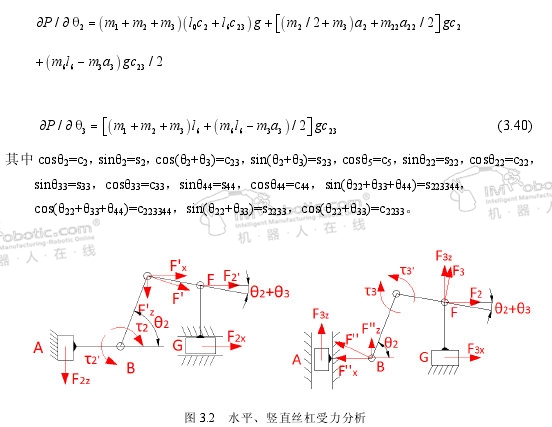
如图3.2所示,固定竖直滑块计算在转矩t2的作用下水平滑块所受水平力,根据作用与反作用力原理计算竖直滑块受到的竖直力;固定竖直滑块计算在转矩t3的作用下竖直滑块所受竖直力,根据作用力与反作用力原理计算水平滑块受到的水平力。经过受力分析可知,水平和竖直丝杠提供的推力F2, F3关于转矩t2, t3的表达式如式(3 41)所示。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
12

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









