





码垛机器人不同负载下动力学仿真与分析
时间:2017-12-18
阅读:7789

码垛机器人不同负载下动力学仿真与分析
作为由美国MDI公司开发的运动仿真类型软件, ADAMs的任何一个用户都能够轻松地对三维虚拟样机模型进行运动学及动力学的仿真分析。另外,它又具有多种开放性接口能与多种三维软件和MATLAB等相连。本文主要用到了ADAMS中两大模块view和postprocessor。
在分析之前先要将UG里建立好的三维模型导入进ADAMS里,具体方法如下:
1.在UG中建立好三维实体模型,然后点击文件—导出—Parasolid格式文件。版本格式选择16.0-NX3.0后命名文件,然后圈选模型。
2.接下来在ADAMS中需要新建一个文件,点击File→Import,格式选择Parasolid,然后选择从UG中导出的文件进行读取,至此,模型便成功导入。
3.模型导入成功后,随后要进行的就是对导入的模型定义材料、摩擦力、添加必要的约束及驱动。
饲料码垛机器人ADAMS动力学仿真
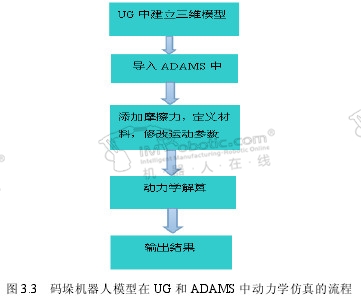
本文在ADAMS中通过改变四个自由度驱动装置的运动参数和手爪处所施加外部负载的大小来改变码垛机器人水平丝杠滑块、竖直丝杠滑块的运动速度、加速度,腰部和腕部旋转的角速度、角加速度。从而得出施加不同载荷时,水平、竖直丝杠滑块所需施加的推力曲线,腰部和腕部转轴所需施加扭矩曲线。针对本文对饲料码垛机器人的仿真过程给出了下列流程图3.3:
把UG里绘制好的详细样机模型导入到ADAMS中进行进一步的仿真分析,首先需要在ADAMS环境进行如下设置:
(1)打开ADAMS/VIEW,设置重力工作环境,其中包括重力的大小、方向。点击菜单中的按钮setting}gravity,根据建模中设置的基础坐标系方向,将其重力方向设置为一Z方向,大小为默认值9806.65。
(2)设置各连杆连接处的运动副摩擦力。右击选择运动副,点击添加摩擦力按钮。在对话框Mu Static和Mu Dynamic中可分别进行滚动体的静摩擦系数与动摩擦系数的设置,这里我们采用默认数值0.5的静摩擦系数,至于动摩擦系数就需要根据不同种类的轴承来查取机械设计手册而定了。在此次设计中应用的轴承包括深沟球轴承听μ=0.0010-0.0015;圆锥滚子轴承听μ=0.0017-0.0025;圆柱滚子轴承μ= 0.0008-0.0012。
(3)对于码垛机器人工作路径的设定我们是通过ADAMS里的STEP函数来实现的。按预定的运动方式在Function对话框中添加相应的STEP函数。
将模型导入到ADAMS里,设置好摩擦系数、转矩等参数后得到图3.4模型:

使用ADAMS进行模型重力、摩擦力、转动副、移动副等定义后,进行动力学解算。点击Simulation→Simulate,根据此码垛机器人的运动周期,将End Time设定为6s。由于ADAMS的动力学仿真所使用的计算方法均为插值法。在仿真的设定中如果设置的插值数过少,可能会导致仿真失败或者结果误差过大不具有参考价值,而设置的插值数过多会使仿真时间过长,增加计算机的运算负担。在ADAMS中采取默认值的方法为用户提供了一个比较折中的参考值。即如果用户不具有特别的要求使用该默认值即可达到比较理想的要求。根据饲料生产现场的要求将码垛机器人的仿真周期设定6s,仿真步数设定为100步。在Simulation Control界面点击了√,进行模型的检查。模型检查成功后方可进行运动学仿真。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
12

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









