





码垛机器人不同载荷下各关节动力学仿真结果对比

码垛机器人不同载荷下各关节动力学仿真结果对比
根据实际码垛情况,其工作过程主要包括如下4个步骤:
1.从原点位置开始,水平和竖直丝杠螺母同时运动,当手爪运动到饲料袋出料停放处上方时水平运动停止,手爪在此过程中张开。
2.竖直丝杠螺母继续向下运动直到手爪到达饲料袋停放位置时停止。
3.闭合手爪,抓牢饲料袋。
4.竖直丝杠螺母往下运动,使手爪提升起饲料袋,提过饲料袋挡板高度时,腰部的转动与竖直和水平丝杠螺母运动同时进行,使饲料袋运动到托盘上方规定位置,打开手爪将饲料袋放下。
为了分析不同载荷对码垛机器人驱动关节力和力矩的影响程度,以6s为工作周期在相同的工作路径中,在1.6~4s分别对手部加载50kg和100kg比质量的载荷进行动力学仿真。但是在ADAMS中不能添加一个质量随时间突变的物体,考虑到这个问题,分别对无载荷、全程50kg载荷、全程100kg载荷三种情况进行仿真。
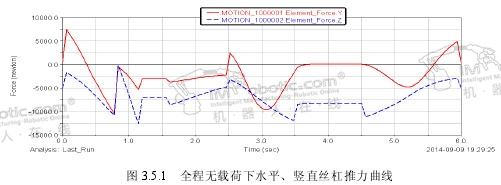
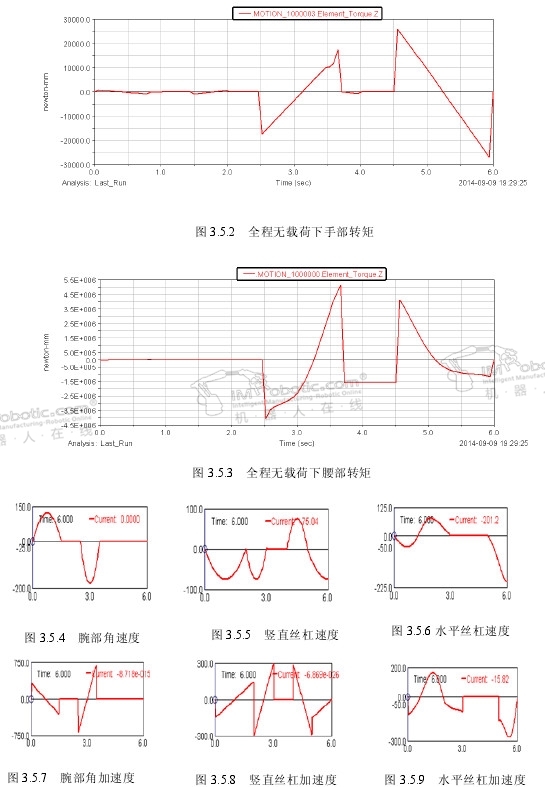
码垛机器人在全程无载荷情况下得到的水平丝杠推力(实线)、竖直丝杠推力(虚线)、腕部角速度、腕部角加速度、腰部角速度、腰部角加速度、水平丝杠速度、竖直丝杠速度、水平丝杠加速度、竖直丝杠加速度、手部转矩、腰部转矩曲线图如图3.5所示。

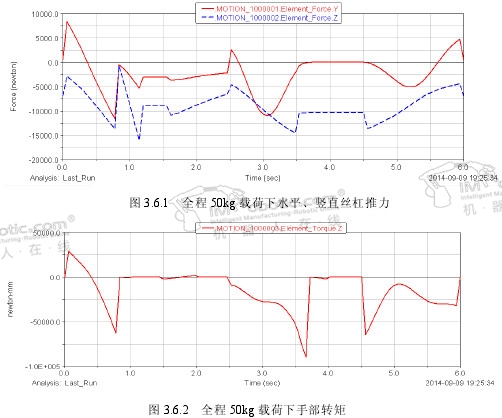
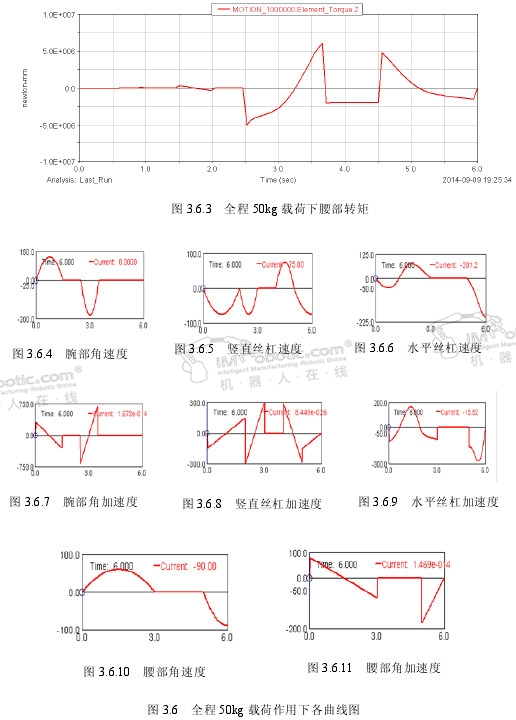
码垛机器人在全程50kg载荷情况下得到的水平丝杠推力(实线)、竖直丝杠推力(虚线)、腕部角速度、腕部角加速度、腰部角速度、腰部角加速度、水平丝杠速度、竖直丝杠速度、水平丝杠加速度、竖直丝杠加速度、手部转矩、腰部转矩曲线图如图3.6所示。
码垛机器人在全程100kg载荷情况下得到的水平丝杠推力(实线)、竖直丝杠推力(虚线)、腕部角速度、腕部角加速度、腰部角速度、腰部角加速度、水平丝杠速度、竖直丝杠速度、水平丝杠加速度、竖直丝杠加速度、手部转矩、腰部转矩曲线图如图3.7所示。

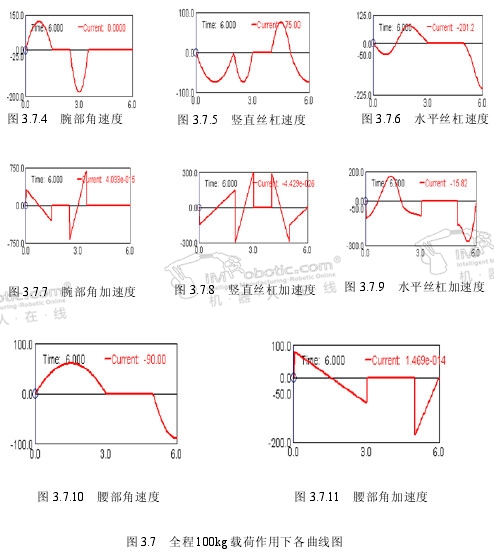
根据三组力和力矩曲线的变化趋势,整体的峰值及1.6~4s内的峰值等关键参数的比较。可以得出不同载荷对码垛机器人各驱动关节的影响情况,在两种不同的载荷下水平、竖直丝杠推力的最大值和最小值如表3.2~3.5所示:




好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
- 2024-07-05
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11









