





码垛机器人各轴速度和加速度分析
时间:2017-12-27
阅读:23514

码垛机器人各轴速度和加速度分析
速度和加速度正解分析
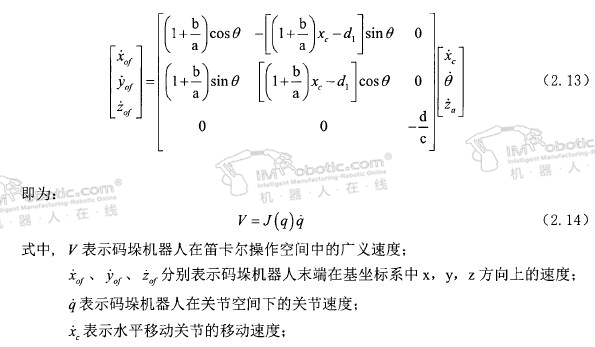
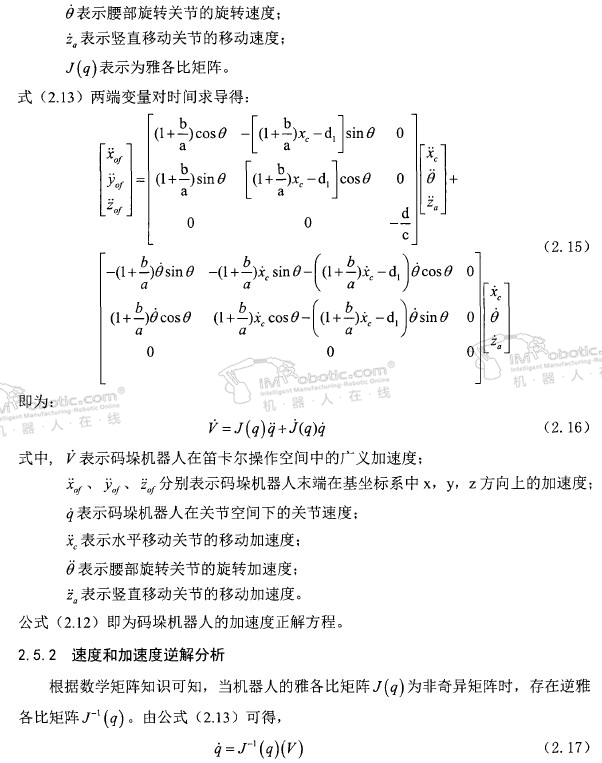
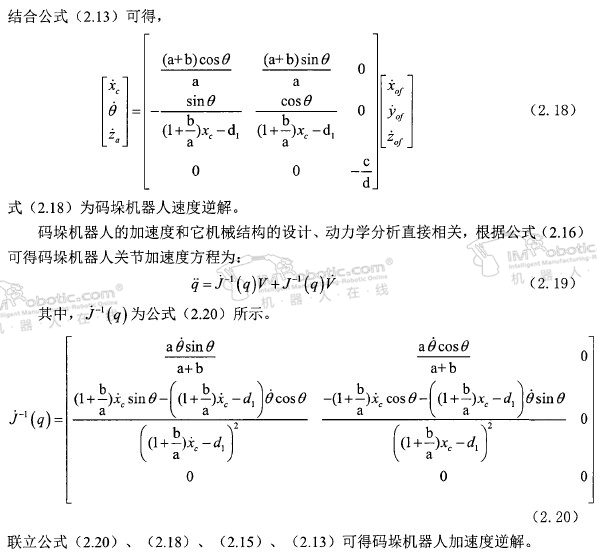
速度是位移关于时间的导数,通过对机器人运动学速度的分析可以得到机构的雅各比矩阵,同时,速度与加速度也是机器人重要的运动特性,对公式(2.11)两端分别进行求导,并写成矩阵形式可得公式(2.13,即码垛机器人的速度正解方程。
奇异性和工作空间分析
奇异性分析
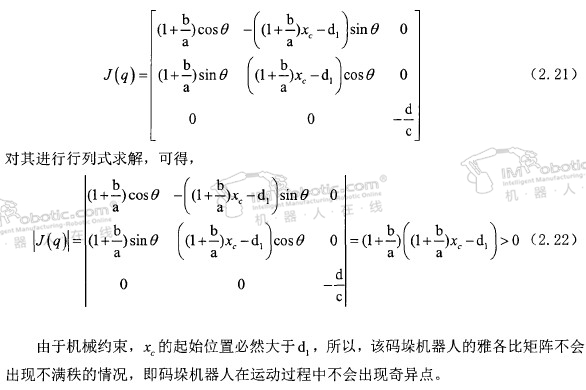
奇异点是指机械结构运动时处在一些死点、运动失控点、极限点等一些特殊位置的点,此时,机构的运动性能会突变,机构失去控制。从数学层面上讲,在任何时刻均能完全确定码垛机器人形态的所有关节变量的一组位移值中,为保持笛卡尔空间内的速度,关节空间中的关节速度有可能出现无限大的情况,即在奇异点附近可能会产生无法预料的高转速。所以,分析码垛机器人机构的奇异性是研究机器人运动学必不可少的内容,奇异点只在雅各比矩阵不满秩的时候出现。由公式(2.13 )得到雅各比矩阵为,
工作空间分析
机器人的工作空间是机器人末端执行器参考点所能掠过的空间集合,代表着机器人的活动范围,是机器人的一项重要的性能指标。工作空间在机器人的设计与应用中都是必须考虑的关键问题,主要分为灵活工作空间和可达工作空间,灵活工作空间指的是机器人可以以多种姿态,灵活地在该范围内运动,而可达工作空间指的是机器人必须以某种姿态才能在该空间范围内运动。
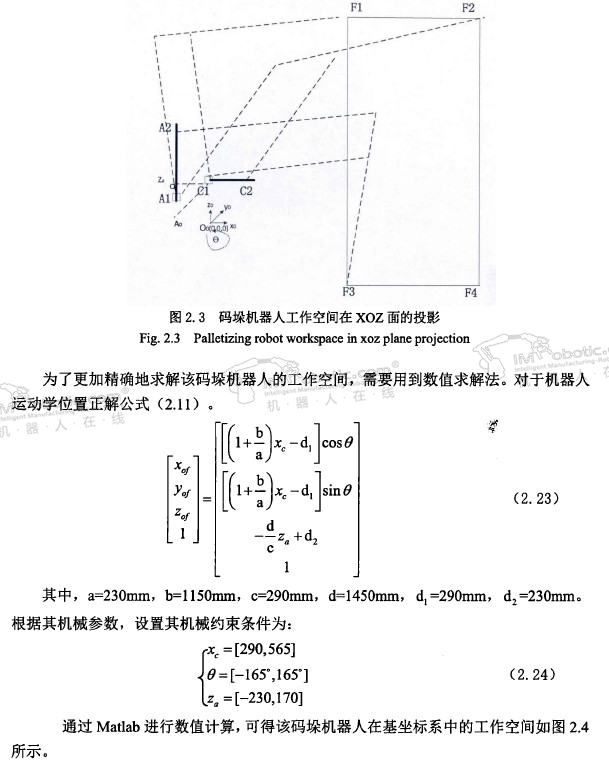
分析机器人的工作空间时,通常用主视图和俯视图中末端参考点的极限位置所构成的边界曲线来表示。该码垛机器人的工作空间可以通过XOZ面上的工作空间旋转得到。如图2.3所示,A1和A2分别表示竖直滑块在竖直丝杠上的下上极限点,C1和C2分别表示水平滑块在水平丝杠上的左右极限点。根据该码垛机器人在水平和竖直方向上运动学解祸的特点,分别控制竖直滑块到达A1, A2和水平滑块到达C1, C2,得到机器人末端的极限点为F1, F2, F3, F4,所以码垛机器人的工作空间在XOZ平面上的投影是F1F2F3F4为四个顶点的矩形。
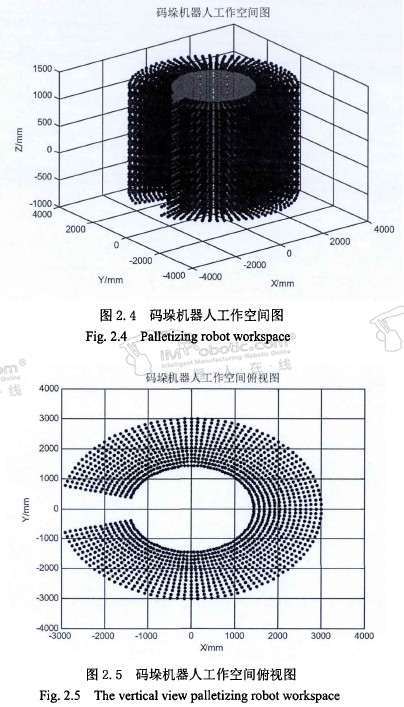
排除机械原因后,图2.4, 2.5的理论分析结果和实际测试基本符合。其工作空间为一个
圆柱体,半径为[1450,3100],高度为[-920,1080],单位为mm。
本章根据码垛机器人特殊的机械结构特点,通过空间几何法与坐标系齐次变换法分析了码垛机器人运动学位置的正反解,建立了码垛机器人的运动学模型,通过PLC_Config进行运动控制编程,通过实际测得的数据来验证所建机器人运动学模型的正确性。并且通过对位置正反解进行一阶、二阶求导得到速度、加速度正反解。根据得到的雅各比矩阵,通过计算其矩阵特征值分析码垛机器人运动范围的奇异性,并且利用Matlab求解了码垛机器人的工作空间。

机器人
码垛机器人
技术干货

好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-18 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-11 13:34:57
- 2023-05-09 07:25:25
- 2022-08-24 08:13:44
- 2023-01-10 09:48:37
- 2023-01-27 13:17:04
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-18
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









