





【干货】ABB机器人编程技巧9:创建带参数例行程序

1)什么是参数例行程序?
例行程序可以输入参数,使用的时候看起来就像自定义指令
2)有什么用?
方便使用,用户不用关心内部实现过程
3)如何创建
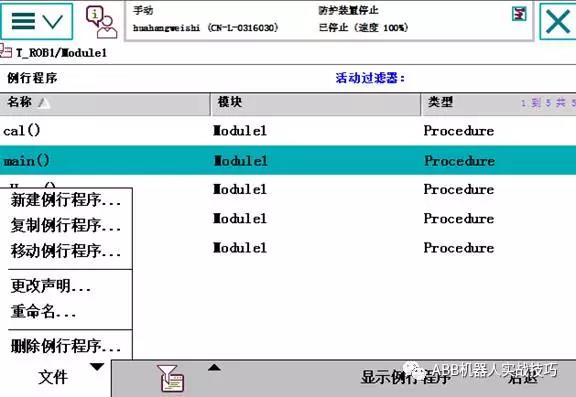
1.新建例行程序
2.设置名称,点击参数,设置输入参数

3.添加参数,注意右边的数据类型即为该参数数据类型,此处举例输入为2个robtarget

4.点击确定。
5.程序内部根据自己需要添加内容
6.带参数例行程序不能直接使用,必须有人调用,且输入参数,如下

使用ProcCall

7.此处举例pknpl指令的创建,实现功能为从pHome位置吸取并到Target_10位置放置
PROCRoutine2()
pknpl pHome,Target_10;
ENDPROC
PROCpknpl(robtarget pick_pos,robtarget place_pos)
MoveJoffs(pick_pos,0,0,30),v500,z1,tool0;
MoveL pick_pos,v500,fine,tool0;
Set do1;
MoveLoffs(pick_pos,0,0,30),v500,z1,tool0;
MoveJoffs(place_pos,0,0,30),v500,z1,tool0;
MoveL place_pos,v500,fine,tool0;
ReSet do1;
MoveL offs(place_pos,0,0,30),v500,z1,tool0;
ENDPROC
【干货】ABB机器人编程技巧8:ABB机器人数据存储类型区别
CONST VAR PERS 区别
1)ABB机器人任何数据都有存储类型,分为常量CONST,变量VAR和可变量PERS

2)常量CONST,即程序内不能赋值
3)变量和可变量程序都能赋值,区别如下
变量-有初值和当前值。在执行打开程序,移动指针到main,移动指针到routine时,变量的当前值会被初始化,即值变为初值
可变量,只有当前值。即任何时候做了修改,其值就修改了。在执行打开程序,移动指针到main,移动指针到routine时,值就是当前值,不会发生变化
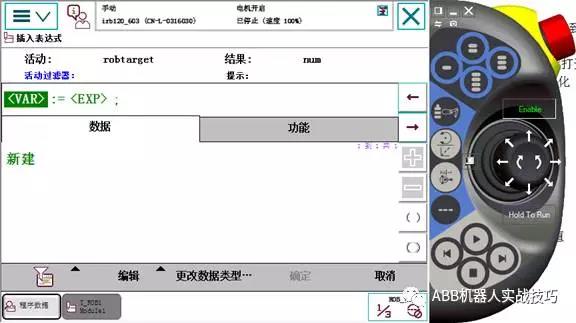
4)默认插入的robtarget的存储类型是const,即常量,此时无法赋值(如下图,即使类型选到robtarget还是不显示已经建立的robtarget)
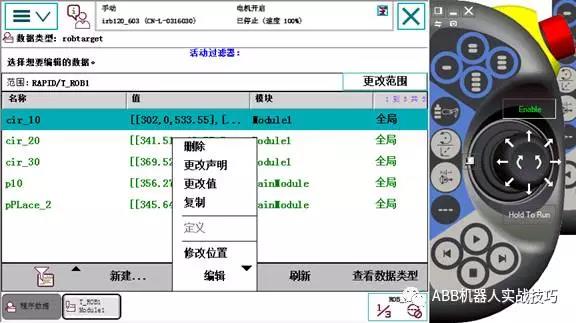
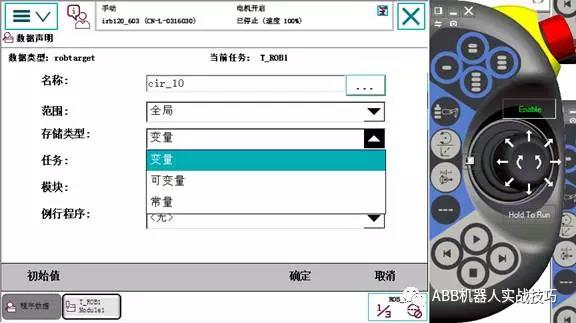
此时,到程序数据,找到这个数据,编辑-更改申明,修改为变量
此时插入赋值语句时,就能找到这个点位了。

【干货】ABB机器人编程技巧1:ABB机器人Pdisp 轨迹偏移使用
【干货】ABB机器人编程技巧3:在robotstudio创建两台机器人的socket连接
【干货】ABB机器人编程技巧4:双工位预约程序
【干货】ABB机器人编程技巧5:与相机通讯的Socket收发数据处理与提取
【干货】ABB机器人编程技巧6:ABB机器人如何创建数组
【干货】ABB机器人编程技巧7:ABB机器人创建自定义数据类型
【干货】ABB机器人编程技巧8:ABB机器人数据存储类型区别
【干货】ABB机器人编程技巧10:ABB机器人创建码垛程序
【干货】ABB机器人编程技巧11:创建有规律的机器人旋转Robtarget
【干货】ABB机器人编程技巧12:Fine与z0的区别

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20 -
什么是SLAM技术?应用领域有哪些?
关键字: slam技术 应用领域 2024-06-19
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
- 2022-08-03 10:20:40
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









