





【干货】机器人焊装夹具气路设计过程介绍

汽车零部件机器人焊装夹具气路设计过程可分为夹具设计、气路图设计、气路安装施工 3 个阶段。本文首先会为各位读者介绍机器人焊装夹具气路的组成结构,再按照 3 个阶段顺序给出气路图设计的一般方法。
一、机器人焊装夹具气路的组成结构
汽车零部件机器人焊装系统的基本气路结构如图 1 所示。包括能源装置、执行装置、控制调节装置、辅助装置、传动介质等部分。
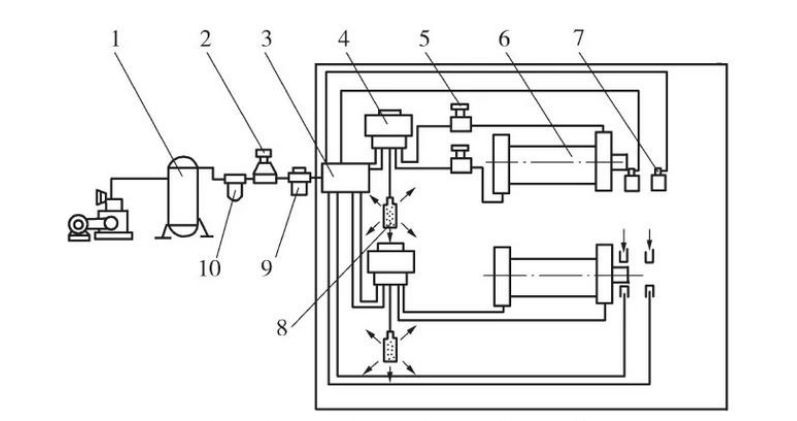
图 1 汽车零部件焊装夹具气路系统基本组成
二、机器人焊装夹具气路设计
2.1 夹具设计阶段
夹具设计阶段是设计气路的第一阶段。夹具设计初期应根据夹具情况预先选择管线材料。并且气管管径过小会造成节流,因此限制气缸的速度;而管径过大会造成滞流,因此增加空气消耗量和填充时间。此外,夹具设计阶段在考虑夹具机械结构设计的同时,应为气路设计预留出走线孔,规划线槽,考虑电磁阀集装板及控制模块安装空间,及是否超过变位机各回转半径。
2.2 气路设计阶段
气路设计的原则是让气路中的执行装置定位夹紧可靠,按照一定的顺序松开、夹紧并确保安全。
(1)确定气路初始每一个气缸的伸出缩回状态。
(2)根据各种不同的控制目的及控制功能的要求,设计气动回路。
(3)确定回路组数。设计时可将动作互不干扰的动作合并到同一个方向控制阀来控制,但需要根据压紧力、气缸动作速度等情况计算每组回路最多控制的气缸数量。
(4)确定控制阀形式。在设计计算出控制阀数量后一般预留两个空位,以便后期增加气缸还能继续使用。
(5)编号并设计制作标牌。按照回路的动作顺序,先对回路进行排序,然后排出每一组回路中的气缸的先后动作顺序,定义控制阀。
(6)绘制气路图
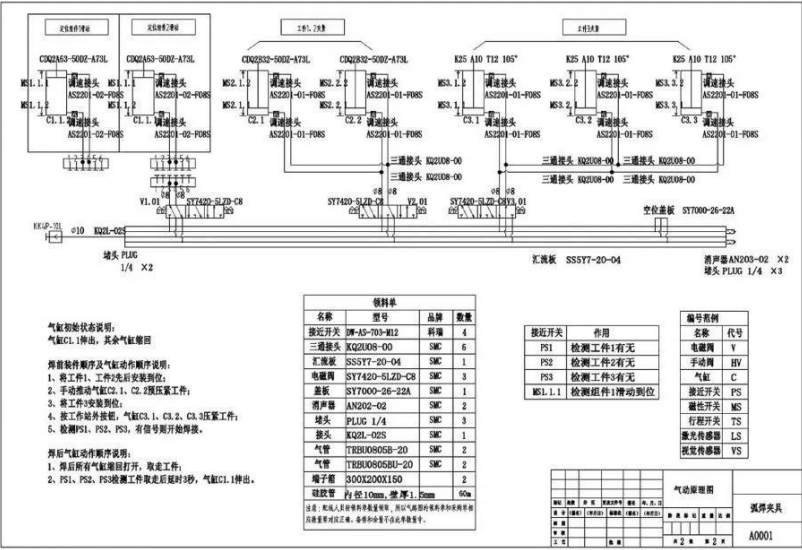
图2 机器人焊装夹具气路图气动原理部分
2.3 气路安装施工阶段
汽车焊装夹具组装完毕后开始气路的安装施工,气路的安装施工顺序为:三联件、控制阀、气缸标牌、主气管、各回路、信号线、主进气管。

图3 夹具主气管及线缆安装示意
最后,希望本文对各位读者机器人焊装夹具气路设计过程的了解能有所帮助。

好的文章,需要您的鼓励
15

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-05-14 13:36:48
- 2019-09-27 11:29:38
- 2022-06-27 10:05:41
- 2020-08-17 15:11:43
- 2019-01-25 11:08:57
- 2020-10-16 13:27:55
- 2022-08-24 12:09:31
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









