





【参数】一文详解机器人机械性能参数(ER10L-C10)
时间:2019-02-22
阅读:23852
原创

ER10L-C10 埃夫特机器人机械性能参数详解
一、性能参数定义
机器人性能参数主要包括工作空间、机器人负载、机器人运动速度、机器人最大动作范围和重复定位精度。
(1) 机器人工作空间
参考国标工业机器人特性表示(GB/T 12644),定义最大工作空间为机器人运动时手腕末端所能达到的所有点的集合。
(2) 机器人负载设定
参考国标工业机器人词汇(GB/T 12643),定义末端最大负载为机器人在工作范围内的任何位姿上所能承受的最大质量。
(3) 机器人运动速度
参考国标工业机器人性能测试方法(GB/T 12645),定义关节最大运动速度为机器人单关节运动时的最大速度。
(4) 机器人最大动作
参考国标工业机器人验收规则(JB/T 8896),定义最大工作范围为机器人运动时各关节所能达到的最大角度。机器人的每个轴都有软、硬限位,机器人的运动无法超出软限位,如果超出,称为超行程,由硬限位完成对该轴的机械约束。
(5) 重复定位精度
参考国标工业机器人性能测试方法(GB/T 12642),定义重复定位精度是指机器人对同一指令位姿,从同一方向重复响应 N 次后,实到位置和姿态散布的不一致程度。
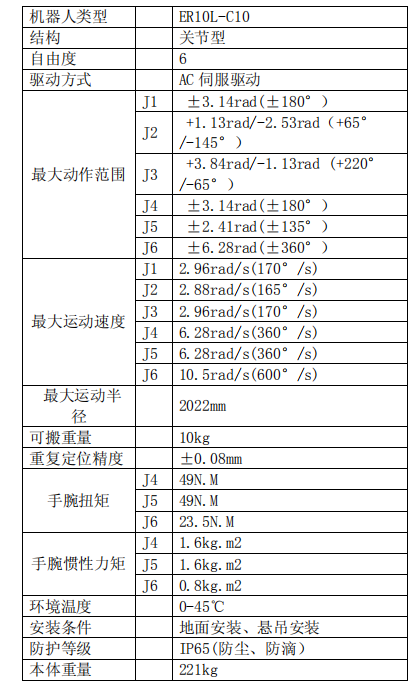
二、机器人性能参数
(1) 机器人性能参数表如下表所示。
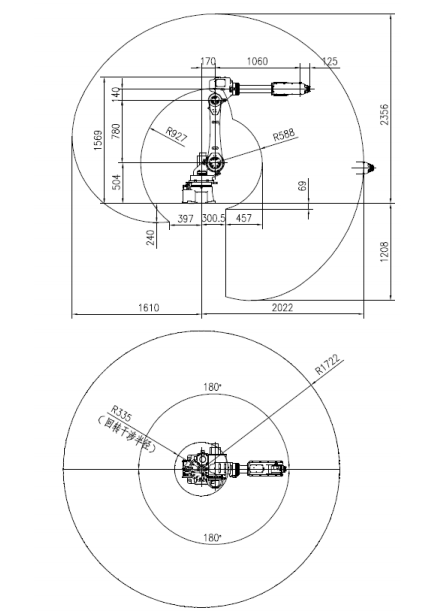
(2) 机器人工作空间图如下图。
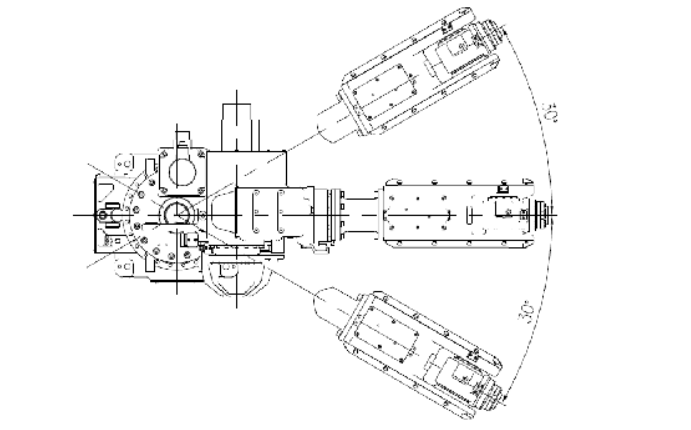
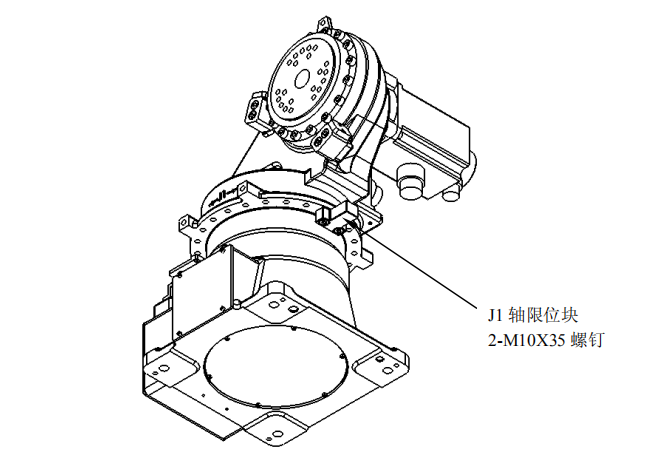
(3) J1轴可变范围图
J1 轴最大动作范围±180°,但是在设计时,增加了控制运动范围的部件,通过移动J1 轴限位块可以实现每隔 30°的范围变动。
机器人
技术干货

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









