





【抗干扰】发那科机器人抗干扰措施
时间:2019-02-28
阅读:13959
原创

发那科机器人干扰产生主要原因与相关抗干扰措施
一、干扰产生的主要原因
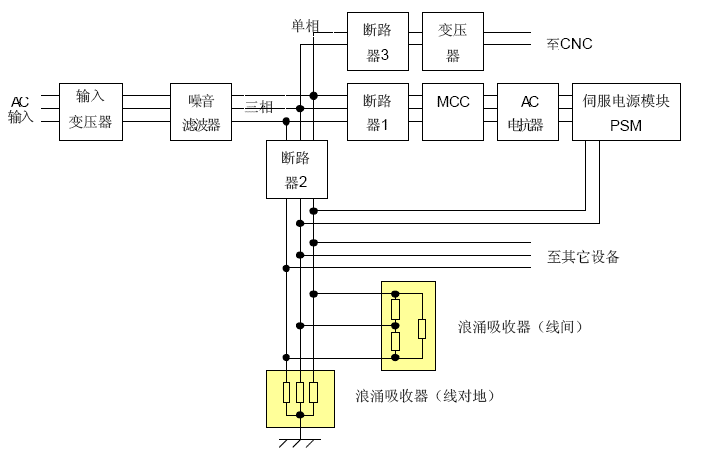
(1)电源进线端的浪涌电流
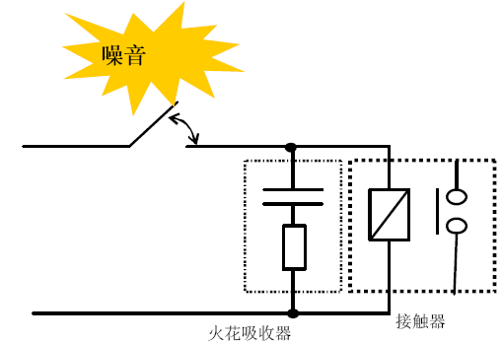
(2)感性负载(交流接触器、继电器等)接通关断时反向电动势引起的脉冲干扰
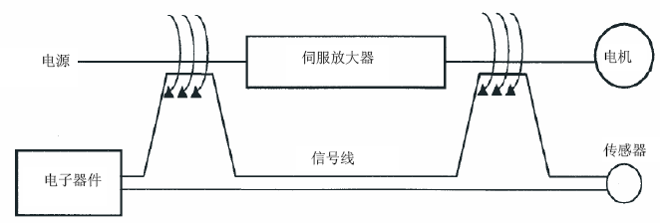
(3)辐射噪音的干扰

(4)感应噪音的干扰
(5)传导噪音的干扰
连接同一电源和公共地线的设备之间,因某一大功率的器件所产生的噪音,可对其他设备产生传导噪音的干扰。

二、相关的抗干扰措施
(1)电源输入端加装浪涌吸收器和噪音滤波器、隔离变压器等。
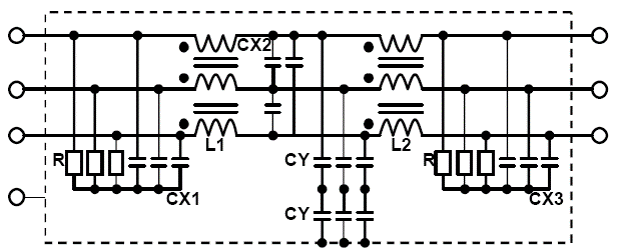
噪音滤波器
a、消除电缆的辐射噪音
b、杂散电容引起的传导噪音
(2)交流感性负载(接触器线圈)加装灭弧器;直流感性负载(继电器线圈)加装二极管
(3)接地
系统分三种地信号:
信号地(SG):供给控制信号的基准电平(0V)
机壳地(FG):为了运行可靠、抵抗干扰而提供的将内部和外部噪音隔离的屏蔽层。各单元的机壳、外罩、安装板和电缆的屏蔽均应接在一起。
系统地(PE):保护地。各装置的机壳地和大地相连,保护人员免予触电危险的同时还可使干扰噪音流入大地。
注:信号地和机壳地在系统内部已经相连系统的机壳地如下图
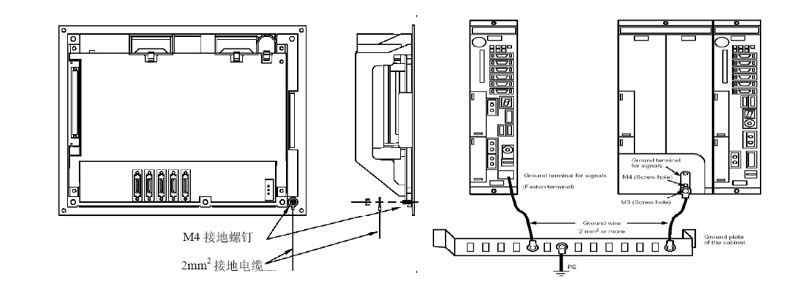
放大器的接地

(4)信号线和动力线走线分离
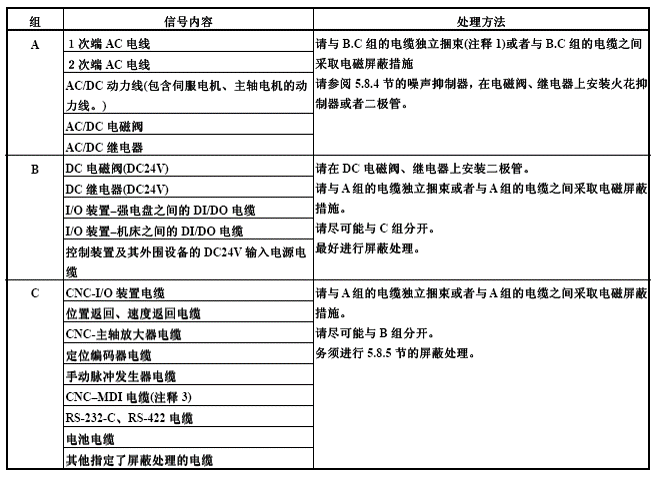
注:独立捆束指组和组之间的间隔在10cm以上,电磁屏蔽措施可采用钢板隔离等手段。
(5)信号电缆的屏蔽接地处理
系统的信号线全部采用屏蔽电缆,其接地方法如下图

以上方法的采用可主动性避免干扰的出现。
技术干货

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









