





【前沿】MIT CSAIL改进了拾取机器人处理新物体的能力

机器人擅长做的一件事就是一遍又一遍地重复,而面对不同形状和大小的物体需要并采取不同的行动,但复杂的姿势和不熟悉的物体对它们中的大多数构成了挑战。所以这就是为什么他们不仅需要定位物体并理解如何抓住它们,这需要大量的训练数据,应对复杂的环境。这显然属于更高级别的技术。
不过麻省理工学院计算机科学与人工智能实验室(CSAIL)的科学家开创出克服这些障碍的方法。在一篇新发表的研究论文 (“Category-Level Robotic Manipulation with K-PAM: Key-Point Affordance Manipulation“)中提到了一个系统Keypoint Affordance Manipulation,或简称为“KPAM”。检测一组目标坐标,称为关键点,启用机器人硬件,在其上部署处理一系列精巧的对象。
“研究智能机器人最重要的是要仔细观察机器人没有做什么,或者不能做什么。”MIT教授Russ Tedrake在一篇关于该项目的新论文中说道,“机器人在重复运动时似乎非常在行,但如果它是他们以前从未见过的物体,实际上就无法以任何有意义的方式来完成。”
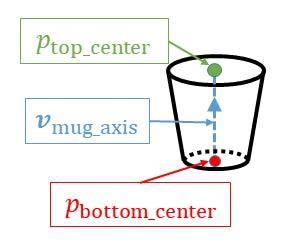
大多数拾取、放置、感知、抓取算法估计位置和方向是几何形状而不是点,所以这很难应对涉及形状奇特物体的任务。相比之下,KPAM的三维关键点管道可以更好地适应对象类型之间的变化。他们提供一个杯子作为一个例子,系统只需要三个坐标来抓住,包括杯子中心的一个关键点,再加上底部和手柄足以完成工作。“只需了解一下这个对象的一些关键点的位置,就足以实现各种拾取操作任务,”Tedrake说。
研究人员利用最先进的积分AI模型进行关键点检测,该模型将单个RGB和深度图像作为输入,并输出每个坐标的概率热图和深度预测图。(在后续步骤中恢复2D图像坐标,深度值和最终3D关键点。)它们通过将关键点网格投影到图像空间中来收集对象的场景训练数据,建立3D算法估计姿势。

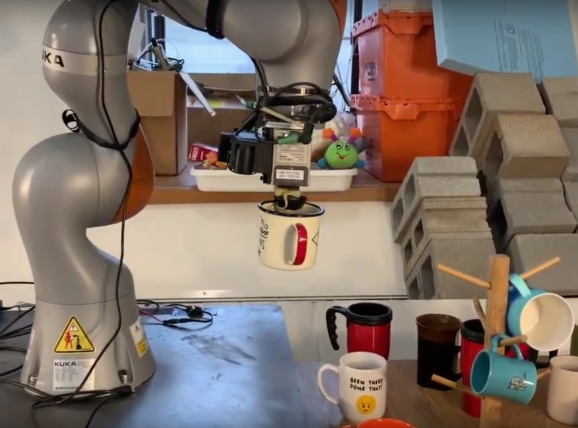
在涉及安装有Schunk WSG 50夹持系统(和深度感应Primesense传感器)的Kuka IIWA LBR机器人的实验中,经过全面训练,成功引导机器人将鞋子放在鞋架上,将马克杯直立放在架子上,并用手柄将杯子挂在架子上。
这款名为Keypoint Affordance Manipulation(KPAM)的智能控制软件旨在为机器人提供更大的灵活性。通过为系统提供六个关键点,科学家们已经拥有一个运行KPAM的机器人手臂,可以拾取20多种不同的鞋子,包括从拖鞋到靴子等等的各种鞋子。尽管在尝试拿起一双高跟鞋时遇到了一些麻烦,但在神经网络训练数据中添加几对数据就很快就完成了任务。
该团队希望继续改进KPAM技术,以便它可以执行更广泛的任务,他们相信有一天,可以帮助机器人拆除洗碗机或清洁厨房柜台以及在工厂和其他工业环境中执行拾放工作等任务。

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22 -
保障六维力传感器在医疗机器人使用中的数据安全和隐私保护
关键字: 六维力传感器 鑫精诚 2024-07-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2019-03-01 13:40:55
- 2014-06-10 08:00:00
- 2018-03-27 13:25:55
- 2021-03-24 09:44:14
- 2019-07-04 11:37:36
- 2017-05-11 00:00:00
- 2022-08-24 12:09:31
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16
- 2024-01-10









