





FANUC机器人指令编辑:变更编号、取消、改为备注

在FANUC机器人程序编辑界面,在编辑(EDCMD)中有一系列的功能选项,本文重点对“变更编号”、“取消”及“改为备注”三个功能做详细介绍。
1.变更编号(Renumber)
该选项的功能作用是:以升序方式,从光标所在行起,自上而下赋予程序中位置变量新的位置编号,使程序中的位置编号更加整齐。

图1
示教编程中,由于经常需要对示教位置点执行插入或删除操作,位置编号在程序中会变得零乱无序(如图2)。
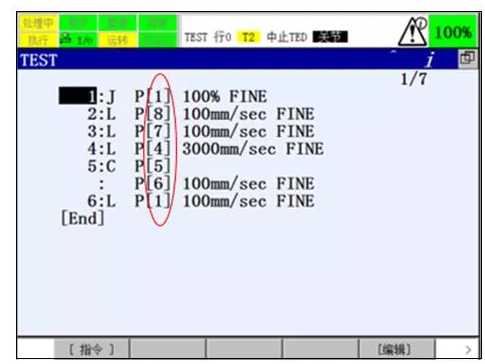
图2
通过变更编号功能,可使位置编号在程序中依序排列(如图3)。
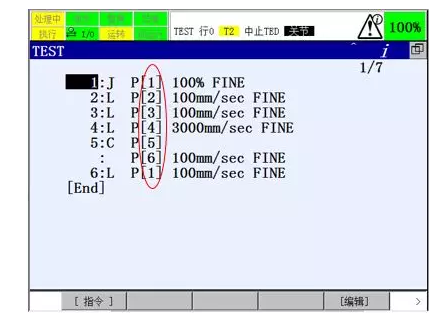
图3
注意:
1、变更编号功能仅对编号顺序进行调整,不改变原程序轨迹。
2、变更编号功能只对位置变量P[i]有效,对位置寄存器PR[i]无效。
具体操作步骤:
将光标移至程序首行后
①选择F5编辑命令;
②选择“变更编号”选项;
③选择F4“是”
(如图4、图5所示)。

图4
备注:由于行1与行6中位置变量相同,都为P[1]。所以,变更编号后两者编号保持一致。
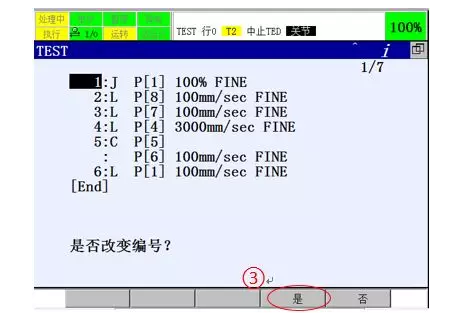
图5
2.取消(Undo)
该选项的功能作用是:可以撤销指令的更改、行插入、行删除等程序编辑操作。
注意:该功能只能撤销上一步操作,不能撤销多次操作。
下文以行删除为例对该功能进行说明。
原程序如图6所示:
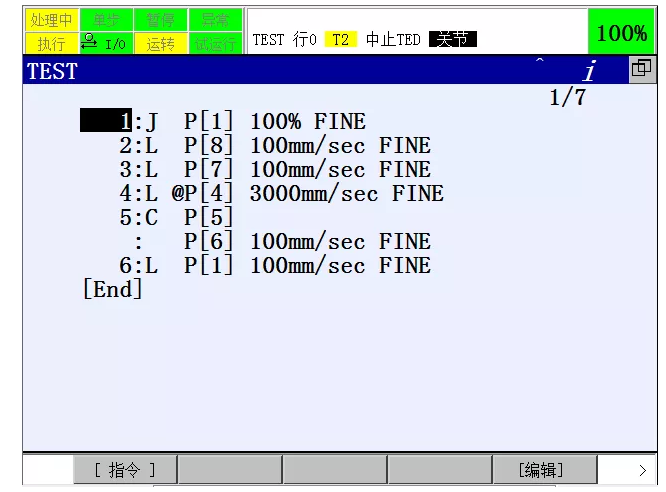
图6
在原程序中删除1-3行后,程序如图7所示:
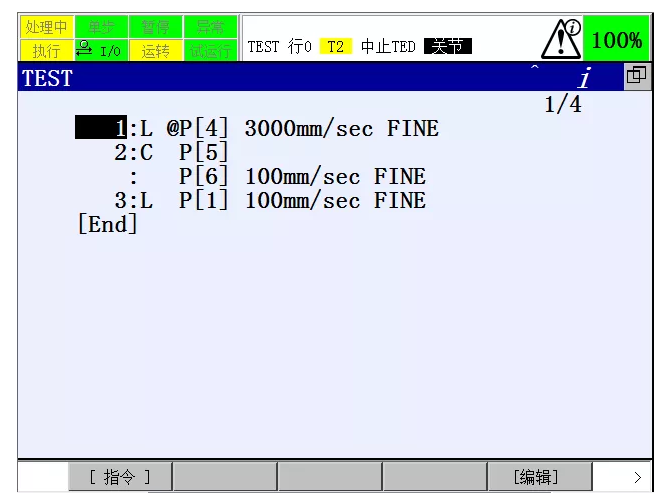
图7
通过使用取消(Undo)功能,能够撤销删除操作,恢复已删除行。
具体操作步骤:
①选择F5编辑命令;
②选择“取消”;
③选择F4“是”
(如图8、图9所示)。
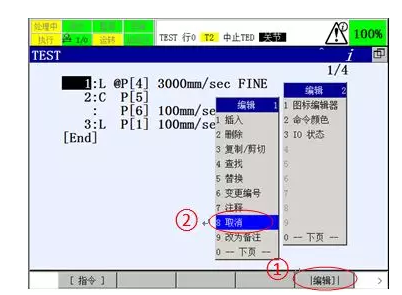
图8
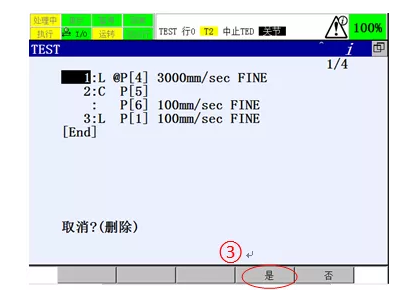
图9
取消后,程序如图10所示。
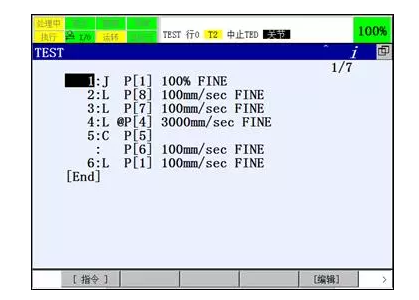
图10
3.改为备注(Remark)
该选项的功能作用是:通过将程序中的单行或多行指令改为备注,可以在程序运行中不执行该指令。原程序如图11,
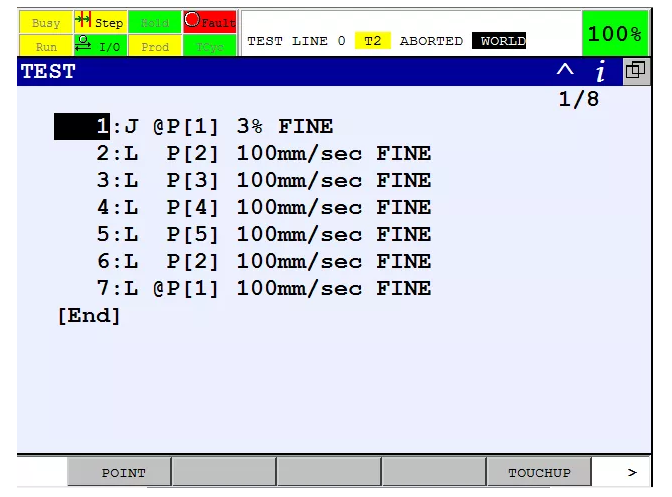
图11
该程序对应机器人轨迹如图12,
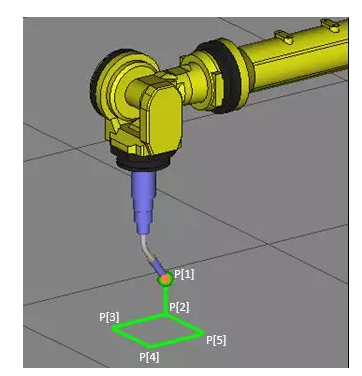
图12
将原程序2-4行改为备注后,在行的开头会显示“//”。改为备注的指令在程序运行中相当于被屏蔽,不会被执行。将2-4行改为备注后,程序如图13,

图13
改为备注后的程序执行效果如图14,行2至行4指令内容保留,但不被执行。
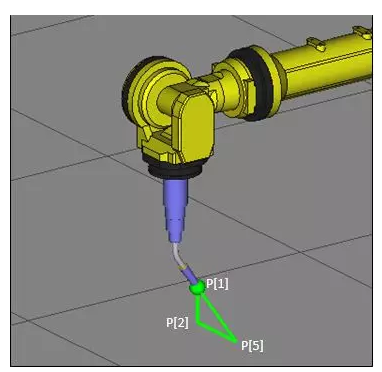
图14
具体操作步骤:
①将光标移至需要改为备注的行号位置;
②选择F5编辑命令;
③选择“改为备注”选项(如图15);
④根据提示,下移光标选中目标对象;
⑤选择F4“改为备注”(如图16)。
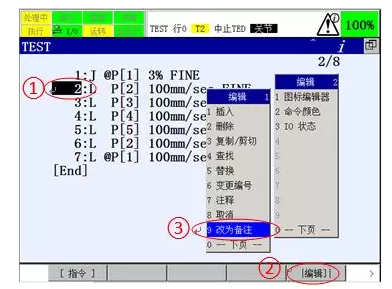
图15

图16
备注:若要取消备注,可按照相同操作步骤选择取消备注。
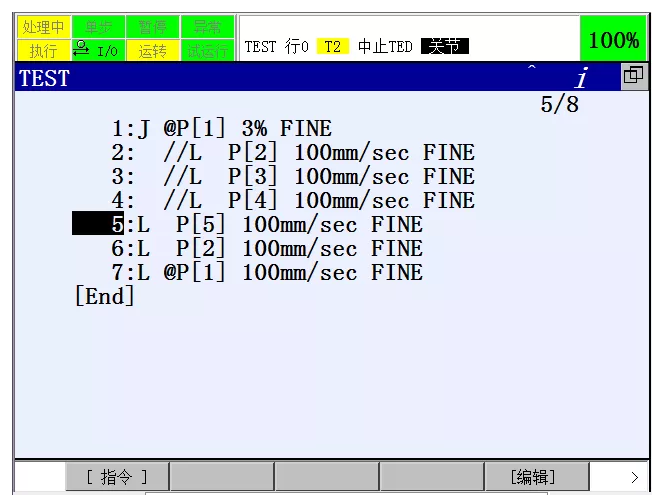
图17

好的文章,需要您的鼓励
8

- 最新资讯
- 最新问答
-
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20
-
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-12-15 13:41:05
- 2022-12-25 00:00:00
- 2022-11-15 16:25:55
- 2024-05-21 09:59:56
- 2022-12-14 09:05:04
- 2022-08-03 10:20:40
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









