





【金雨】弧焊焊接机器人工作站

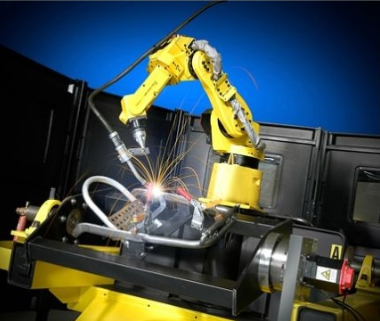
典型的弧焊机器人工作站主要包括:机器人系统(机器人本体、机器人控制柜、示教盒)、焊接电源系统(焊机、送丝机、焊枪、焊丝盘支架)、焊枪防碰撞传感器、变位机、焊接工装系统(机械、电控、气路/液压)、清枪器、控制系统(PLC控制柜、HMI触摸屏、操作台)、安全系统(围栏、安全光栅、安全锁)和排烟除尘系统(自净化除尘设备、排烟罩、管路)等。弧焊机器人工作站通常采用双工位或多工位设计,采用气动/液压焊接夹具,机器人(焊接)与操作者(上下料)在各工位间交替工作。操作人员将工件装夹固定好之后,按下操作台上的启动按钮,弧焊焊接机器人完成另一侧的焊接工作,马上会自动转到已经装好的待焊工件的工位上接着焊接,这种方式可以避免或减少机器人等候时间,提高生产率。
焊接机器人图片
根据选用焊接工艺方法的不同,弧焊焊接机器人工作站一般可分为熔化极气体保护焊(MIG/MAG/CO2)、非熔化极气体保护焊(TIG)、等离子弧焊(Plasma)及变极性等离子弧焊(VPPA)系统等,主要差异在焊接电源系统和接口(机器人-焊机设备),其他配置基本相同;对于焊接电流较大的情况,通常配置循环水冷系统,用于焊枪的冷却。

焊接机器人图片
由于焊缝处于水平位置(或接近水平位置),焊接过程不必使用变位机,可简化结构,降低成本。这种简易工作站多采用两个或多个工位,在工作台上装两个或更多夹具,可以同时固定两个或两个以上的工件,一个工位上的工件在焊接,其他工位上的工件在装卸或等待。工位之间用挡光板隔开,避免弧光及飞溅物对操作者的伤害。这类焊接工作站大多数采用手动夹具。
选择弧焊焊接机器人,应注意以下几点:
1)焊接机器人抓重:由于焊枪和送丝机的重量较轻,焊接机器人抓重一般多选择3~8kg。如果使用激光跟踪传感器等,还要适当提高机器人的抓重能力。
2)运动范围及结构:根据所焊工件的尺寸,机器人运动半径通常选择1.40~1.60m:由于焊接机器人机械结构形式的影响,即使连杆尺寸相近的焊接机器人,其空间运动范围也有一定的差异,四连杆结构的机器人空间运动范围一般小于关节型的焊接机器人。
3)重复定位精度:大部分焊接机器人为0.05~0.1mm之间,即可满足一般焊接要求,而对于精细等离子或激光焊接,应选择精度更高的机器人。
4)具备焊接相关功能:摆动焊接功能,如单摆、三角形和梯形摆动等;焊机接口功能,如模拟量、现场总线、网络接口等;焊接传感器接口功能,如焊缝位置检测,焊缝跟踪等。

焊接机器人图片

好的文章,需要您的鼓励
3

- 最新资讯
- 最新问答
-
【海康机器人】出海 | 深化海外布局,以中国智造赋能全球制造升级
关键字: 海康机器人 出海 2024-09-29 -
新质领航·智驭未来丨iLoabot数字蓝领工人系列闪耀工博会
关键字: 赛那德 工博会 2024-09-29 -
智绘未来,秀出“科技范儿”!法奥机器人邀您共赴2024工博会
关键字: 法奥机器人 工博会 2024-09-29 -
携手致远智启新程│雄克中国新工厂开业典礼圆满举行
关键字: 雄克 新工厂 2024-09-29 -
追光工博会 | 中大力德智驭浪潮,解锁新质生产力的无限可能!
关键字: 中大力德 工博会 2024-09-27
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2018-05-07 12:01:01
- 2017-11-10 08:28:36
- 2018-03-23 11:10:00
- 2018-11-12 08:52:28
- 2018-06-13 17:10:18
- 2018-05-10 10:05:48
- 2022-09-06 06:04:04
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2024-09-29
- 2024-09-29
- 2024-09-29
- 2024-09-29
- 2024-09-27
- 2024-09-27
- 2024-09-26
- 2024-09-25
- 2024-09-25
- 2024-09-25









