





【MiR自主移动机器人】科普 | MiR自主移动机器人的交通逻辑

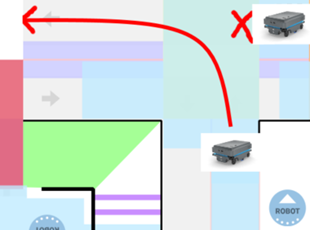
随着地图中行驶车辆的增加,各位是否也有过疑问:如何让那么多的AGV小车在满足一定的行驶规则下仍能实现高效地运行?本次分享内容便会介绍名傲MiR自主移动机器人提供的行驶规则以及如何整合这些规则来实现如下图中各种复杂的交通逻辑。
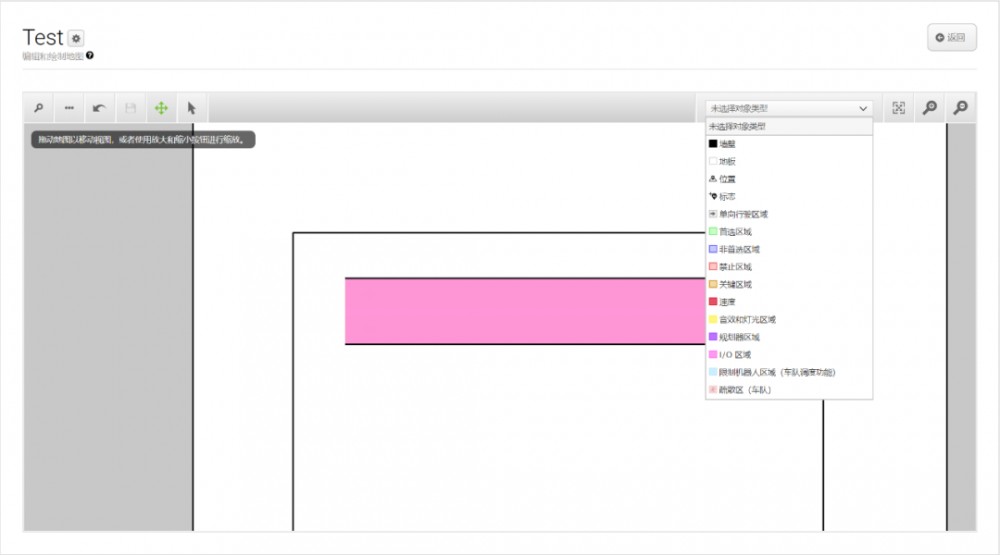
如何添加?
进入MiR界面后依次进入设置→地图→选取地图→ 点击下拉栏即可添加,MiR交通逻辑是通过在地图上添加不同交通逻辑的区域组合来实现,同时同一块区域的逻辑是支持叠加的。
最常见的几种交通逻辑
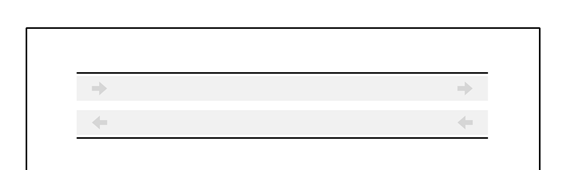
单向行驶区域
在通道内添加两条独立的双行区域来控制行车方向。
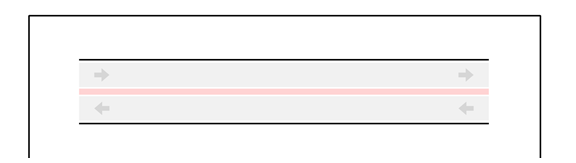
此外也可在两条双向行驶区域中间添加禁止区域来进一步规范行车,避免由于避让障碍物误入逆向车道。
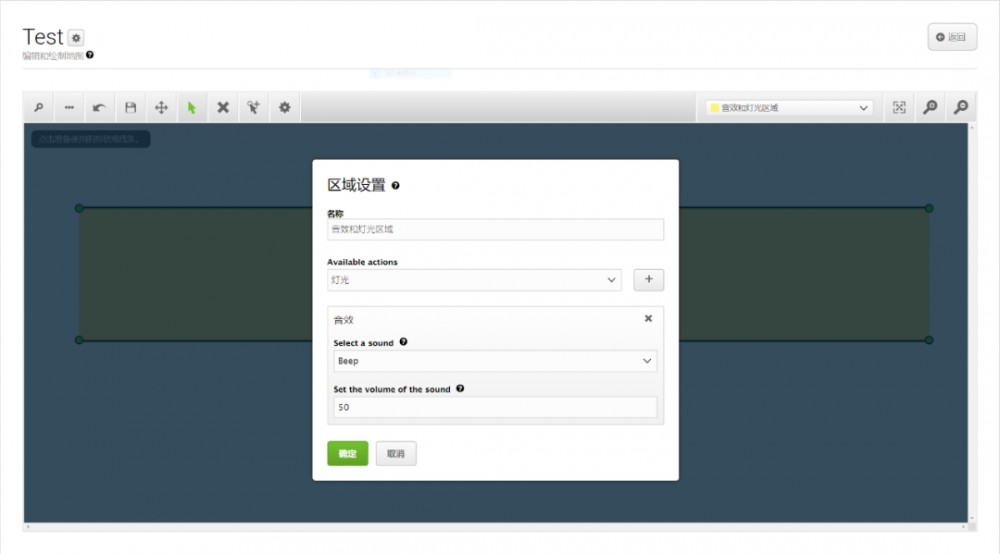
音效和灯光区域
进入区域后MiR通过播放指定音效或者灯光进行提示(多用于人流密集或者视觉盲区)。
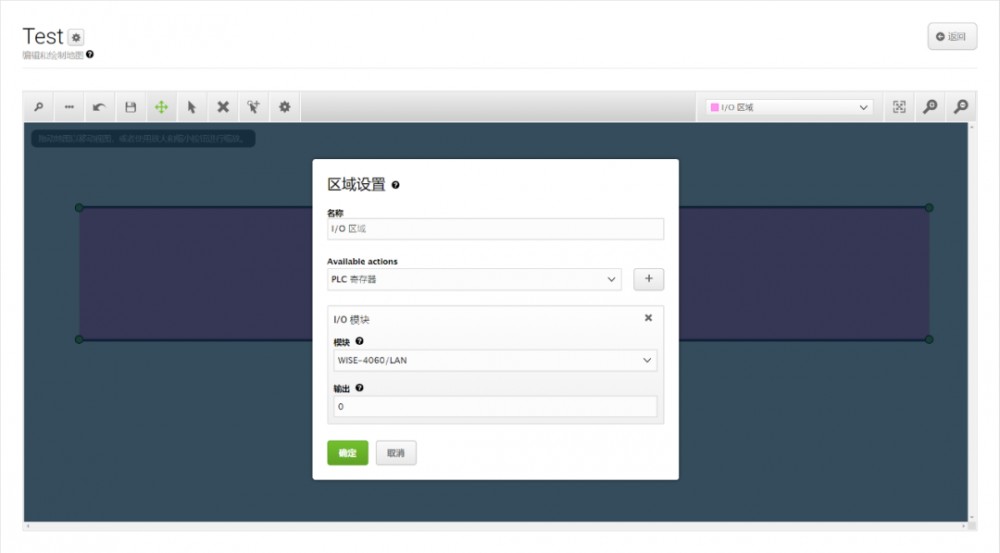
I/O区域
搭配MiR指定的I/O模块使用,Robot进入区域后置位指定I/O模块地址,离开后自动复位(多用于自动门区域实现无停留通过)。
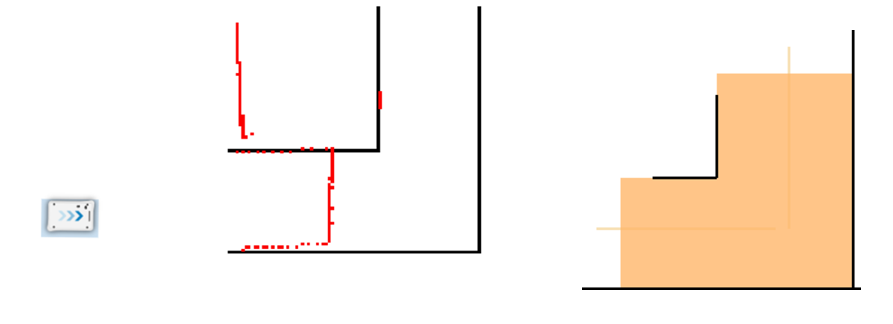
关键区域,前方区域
关键区域的功能是暂时允许全局规划的路线能穿过识别到的障碍物,而前方区域的功能是调节局部规划器对较远距离障碍物的灵敏度,两者多用于以下场景:
· 较长斜坡被误识别为障碍物时,通过添加关键区域及前方区域的方式来保证机器人顺利通过这些区域。
· 同时前方区域也常用于人流密集场合减少局部规划器介入的次数提高在密集人流间的通行能力。
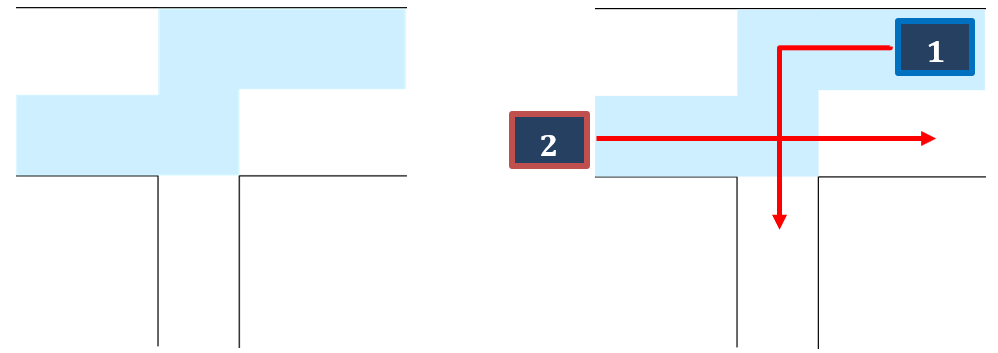
限制区域(需要接入Fleet)
通过控制区域内机器人的数量来避免在狭窄过道/主干道口的拥堵,如下图当区域限制只允许通过1台时NO.1先行进入并占用蓝色区域其他车辆均无法驶入,NO.2在区域外等待直至NO.1驶离限制区域后方可通行。
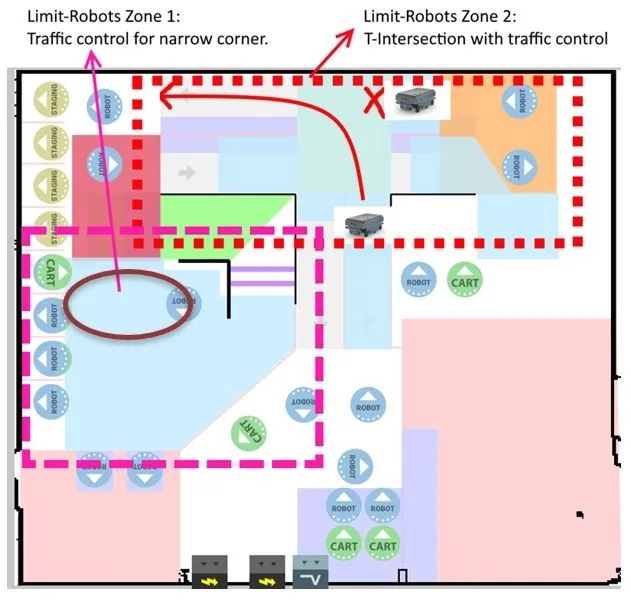
案例
Limit-Robots Zone 1这块限制区域的特点是进/出口是同一个且通道宽度仅可容纳一台机器人,因此使用它来避免多车争抢通道资源导致拥堵的情况,此外还在进入限制区域前增加速度区域(红色)来控制机器人驶入区域时的车速。
Limit-Robots Zone 2 这块限制区域通过叠加了单向行驶区,禁止区域及非优选区来协调T型道口行车顺序以及车流的控制保证机器人在道口的有序通行。
右上方由于有长斜坡的存在因此增加了关键区域来保证机器人的正常驶入。

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00

名傲移动机器人(MiR: Mobile Industrial Robots)
 6年
6年

- 2020-03-11 15:26:17
- 2019-02-25 13:07:59
- 2021-08-03 13:53:32
- 2022-05-19 14:25:29
- 2019-03-11 11:45:13
- 2019-02-26 15:24:20
- 2022-08-27 20:30:34
- 2022-08-29 10:09:11
- 2022-08-29 12:09:44
- 2022-08-29 11:10:44
- 2024-03-10 22:39:40
- 2023-01-03 14:09:15
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









