





绝影Mini最新CMF方案&云深处机器学习仿真平台发布
时间:2020-03-20
阅读:17390

备受关注的中国四足机器人“绝影”,在研发团队的努力下,已经具备了快速跑跳、适应崎岖地形、抵抗外部扰动、环境感知、以及自主导航等核心功能。这次云深处科技为助力科研院校推进智能机器人科学技术研究,丰富动力学开发训练平台,推出基于Raisim搭建的动力学仿真环境平台(以下简称仿真平台)。
绝影Mini是一款面向教育科研领域的可二次开发的智能四足机器人,具备多模态运动能力和自主定位/导航/识别等能力,可适应未知复杂环境,并抵抗外力扰动,可为用户提供运动控制和智能感知两个开发接口,便于其快速便捷地进行算法开发,可应用于机器人领域的多学科实践教学、科学研究以及专业竞赛。
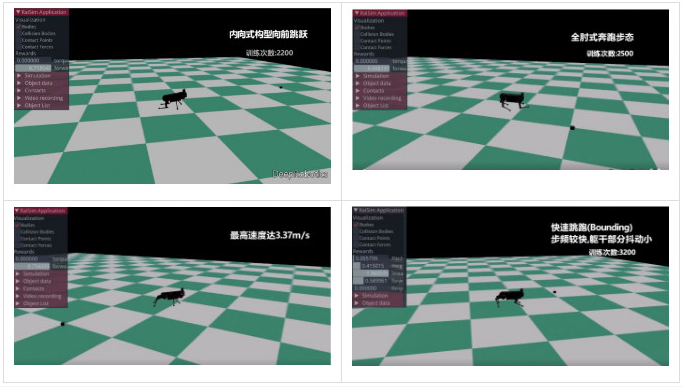
仿真平台支持自定义地形、场景大小,添加多种几何体(如长方体、球、圆锥等)并设置其位置姿态、速度,通过URDF文件自定义添加部署自其他机器人模型,并进行基础的位置控制和力控制,对腿足式机器人的仿真训练具有特殊优势。
用户可以使用C++或C语言编写,也可以使用Python语言设计,与tensorflow、gym等机器学习框架也有良好的兼容性。
目前,研发团队已在仿真平台上集成部署了绝影Mini机器人,并基于策略梯度强化学习算法成功训练出绝影Mini机器人在仿真环境中非平整地面上的跑跳步态(Bound),验证了仿真平台是腿足式机器人极其有效的机器学习仿真平台。
绝影Mini强化学习效果展示完整视频如下所示:
四足机器人
绝影
云深处
仿真

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2017-05-25 09:50:36
- 2019-08-30 17:20:33
- 2020-11-13 16:56:58
- 2017-11-02 06:24:29
- 2019-08-07 13:29:44
- 2020-01-22 09:00:43
- 2024-08-20 15:12:05
- 2022-08-30 17:03:02
- 2022-11-27 20:37:03
- 2022-12-15 22:04:22
- 2022-12-06 08:18:58
- 2023-05-01 14:18:03
栏目推荐
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









