





焊接机器人模拟仿真案例
时间:2017-11-02
阅读:13246


专用焊接机器人模拟仿真案例
1模型简化
由于整个焊接机器人的结构过于复杂,计算量较大,在进行仿真研究之前应对模型进行一些必要的简化,可以去掉一些对仿真结果无影响或影响较小的特征。例如:在十字滑台处,可以将螺纹去掉;一些倒角及圆弧过渡等,这样一来,虚拟样机整体几乎没有改变,但却大大减小了仿真计算时间。
同时在对模型进行仿真之前,还应该对各个部分及零件的单位进行统一,以免在导入ADAMS中出现错误。
2虚拟样机的建立
由于三维建模是采用是PTC公司的PRONE软件,运动仿真采用是MSC.ADAMS软件,因此就会存在模型转换的问题。目前通用的方法大体有两种:
(1)采用Mech/pro软件进行Pro/E和ADAMS之间的无缝对接;
(2)利用通用兼容格式如iges, step, x_t等格式进行转化模型。
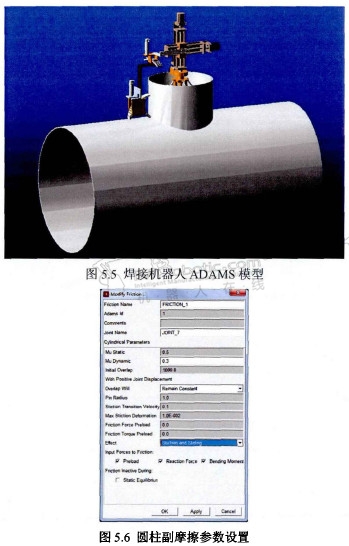
本文考虑到整体模型的复杂程度及转化难易程度,采用了第二种方式,导入ADAMS中,并对其模型进行了必要的简化、美化及相关处理,得到其虚拟样机模型,如图5.5所示。
3定义约束与驱动
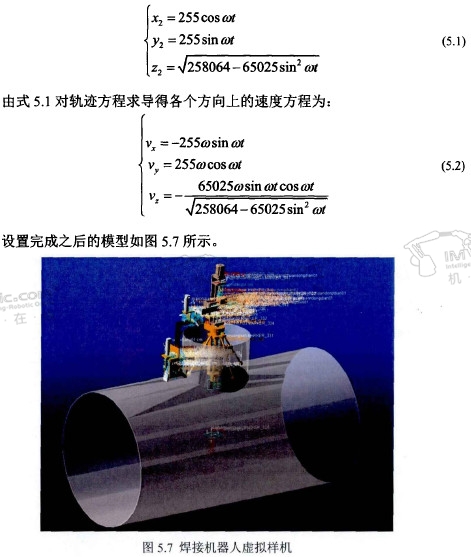
从PRO/E软件经转化导入到ADAMS软件中的模型各个构件之间没有任何约束关系,为了进行运动学分析与仿真,必须安装实际运动时各个构件之间的运动关系添加相应的约束关系。ADAMS软件提供例如完整的约束库,如转动副、螺旋副、移动副、圆柱副、固定副、齿轮副等。例如十字滑台中使用了滚珠丝杠,仿真是简化用螺旋副代替,但考虑到重力及惯性等影响,螺旋副无法自锁,故再添加一个圆柱副,并在圆柱副上设置摩擦参数,如图5.6所示。在各个约束创建完成之后,根据实际运动分析,在相应的运动副上添加驱动,并根据管管正交插接形成的马鞍形焊缝轨迹方程如式 S.I得到运动方程如式5.2,编写相应驱动控制的驱动函数。
4仿真模型检验
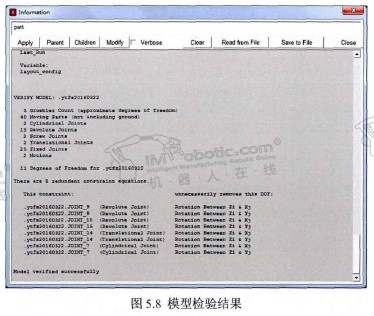
由于本焊接机器人模型较为复杂,各个零件连接关系较为复杂,为了在设置过程中出现不必要的错误,利用了ADAMS提供的模型检验功能来检测其设置的正确性,其结果如下图5.8所示。
5焊接机器人的运动仿真
在前面几个小节中,几何模型、材料属性、运动副及驱动都己经设置,模型的正确性也己得到验证,仿真的前处理工作己经完成。接着就要对焊接机器人进行仿真控制研究,具体仿真操作步骤如下所示:
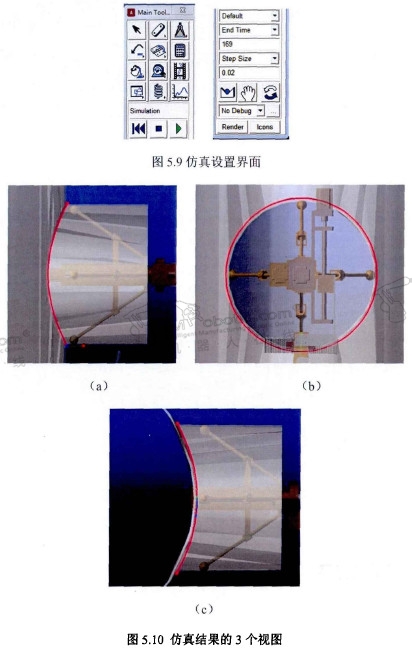
显示主界面操作菜单,点击仿真界面如图5.9所示,设置仿真驱动(前面方程求解得到);
设置仿真类型,默认设置为Default;
设置仿真分析时间,经过前面的计算,按照设置的焊接速度,焊接整个过程大约需要需要169s左右,因此设置仿真终止时间为169;
设置仿真步长,在Steps选项下选择Step Size,设置为0.02;
在完成上述后,点击仿真开始按钮,其仿真如图5.10, 5.11所示。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









