





安川机器人报错代码:原点位置校准和操作方法

6.1 原点位置校准
6.1.1 原点位置校准
所谓的原点位置校准是指机器人位置和绝对编码器位置进行对照的操作。
原点位置校准是在出厂前进行的,在下列情况下必须进行原点位置校准。
• 改变机器人和控制柜 (DX100)的组合时。
• 更换了电机、绝对值编码器时
• 存储内存被删除的时候 (YIF01 基板的更换、电池耗尽时)
• 机器人撞到工件原点偏移时
用轴操作键使机器人运动到原点位置姿态进行原点位置校对。有以下两种
方法。
• 全轴同时登录
• 各轴单独登录
已知原点位置姿态绝对原点数据的情况,可直接输入绝对原点数据。
6.1.2 操作方法
6.1.2.1 进行全轴登录
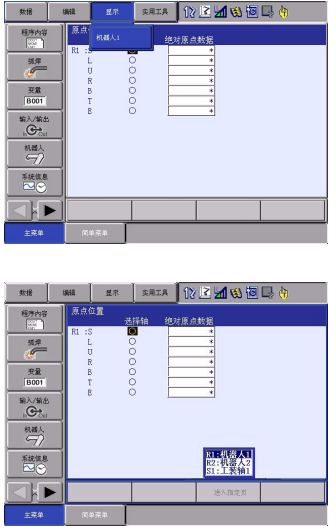
1. 选择主菜单的 【机器人】
2. 选择 【原点位置】
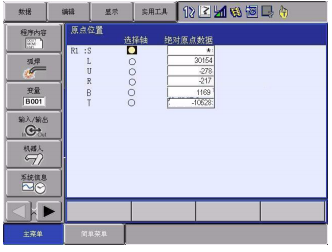
–显示原点位置校准画面。

3. 选择菜单的 【显示】
选择翻页
或者按翻页键
–显示下拉菜单。
4. 选择要控制的轴组。
5. 选择菜单的 【编辑】
–显示下拉菜单
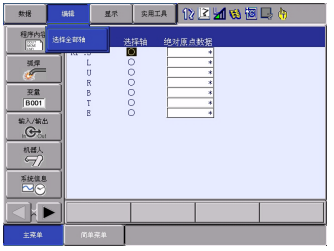
6. 选择 【选择全部轴】
–显示确认下拉菜单。

7. 选择 【是】
–显示的全轴当前值作为原点输入。
–选择 【不】,则操作停止。
6.1.2.2 进行单独登录
1. 选择主菜单的 【机器人】
2. 选择 【原点位置】
3. 选择希望的控制轴组
–在前一项的 【进行全轴的一次性登录】的 3、4 操作里,选择希
望控制轴组。
4. 选择想登录的轴
–显示确认对话框。

5. 选择 【是】
–显示轴的当前值作为原点登录。
–选择 【否】,操作就停止。
6.1.2.3 变更绝对原点数据
对于绝对原点校准完毕的轴,只改变绝对原点数据时,进行以下操作。
1. 选择主菜单的 【机器人】
2. 选择 【原点位置】
3. 选择希望的控制轴组。
–在前项的 【全部轴一次性登录里】的 3、4 操作下,选择希望的
控制组。
4. 选择想要登录的绝对值。
–进入到数字输入状态。

5. 输入绝对值数据。
–修改绝对值数据。
6. 按 【回车】
6.1.2.4 删除绝对值数据
1. 选择主菜单的 【机器人】
2. 选择 【原点位置】
–在前项的 【全轴登录】的 2、3、4 操作里,使之显示原点位置
校准,选择希望控制组。
3. 选择菜单的 【数据】
–显示下拉菜单。

4. 选择 【清除全部数据】
–显示确定对话框。

5. 选择 【是】
–删除全部的绝对值数据。
–选择 【是】,操作停止。

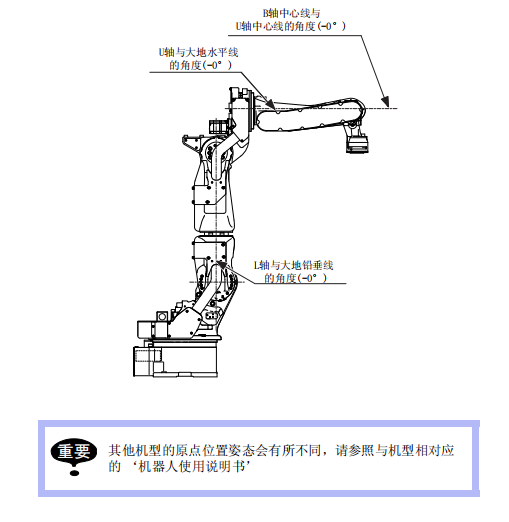
6.1.3 机器人原点位置姿势
原点位置姿势在 VA1400 的情况下如下:

好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-10-27 07:10:03
- 2022-11-01 14:27:03
- 2022-11-09 07:05:05
- 2022-11-09 09:58:04
- 2022-12-26 10:00:03
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









