





安川机器人报错代码:警报的显示和解除和特别的警报显示

8.2.1 警报的显示和解除
若在动作过程中发生警报,机器人会立即停止动作。
示教编程器上会显示警报画面,告知发生警报,停止动作。
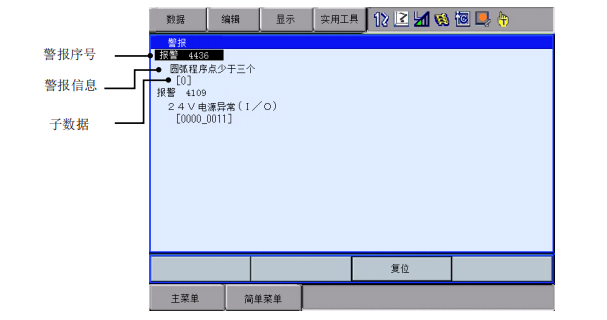
同时发生多个警报时,会以一览表形式显示所有发生的警报。
无法在一个画面中完全显示时,请使用光标键进行滚动显示。
在发生警报时,仅可进行画面显示、模式切换、警报解除、急停这几项
操作。
在发生警报时切换到了其他画面后,可通过主菜单的【系统信息】→
【警报】来重新显示警报画面。
8.2.1.1 解除
警报大致可分为轻故障警报与重故障警报这两种。
〈为轻故障警报时〉
在警报画面中选择“重置”后,会解除警报状态。
要通过外部输入信号(专用输入)重置警报时,请开启“警报重置”专
用信号。
〈为重故障警报时〉
由于硬件故障导致重故障警报发生时,会自动切断伺服电源,停止机器
人动作。
此时,请关闭主电源,待排除警报发生原因后重新接通电源。
8.2.2 特别的警报显示
(1) 子数据 根据警报内容,有时需要添加警报发生轴数据的子数据。
• 十进制数据
无符号时:0 ~ 65535
有符号时:-32768 ~ 32767
• 二进制数据
警报发生数据为1。
八进制时:0000_0001
十六进制时:00000001_00000001
• 轴数据 反向显示警报发生轴数据。
ᮘჾே轴 :机器人 1 ~ 8
:基座 1 ~ 8
•XYZ 坐标数据
反向显示警报发生坐标数据。
•123 数据
•控制轴组数据
(2) 多个伺服包系统
在多个伺服包系统中,安装警报发生伺服包的添加显示。
伺服包序号由EAXA21 基板的 S1 开关决定。
SV#1・・・伺服包 1(EAXA21 基板 S1 开关:0)
SV#2・・・伺服包2(EAXA21 基板 S1 开关:1)
SV#3・・・伺服包 3(EAXA21 基板 S1 开关:2)
SV#4・・・伺服包 4(EAXA21 基板 S1 开关:3)
[ S L U R B T ]
ᇶᗙ轴 [ 1 2 3 ] ᕤ轴 :工装 1 ~ 24
[ 1 2 3 ]
[ X Y Z ]
[ X Y Z Tx Ty Tz ]
反向显示警报发生数据。
[ 1 2 3 ] 反向显示警报发生控制轴组。
[ R1 R2 S1 S2 S3 ]
(3) 独立控制功能(可选)
在独立控制功能(多重任务处理程序)中,安装警报发生程序的添
加显示。
TASK#0・・・多重任务处理程序
TASK#1・・・子任务1程序(SUB1)
TASK#2・・・子任务2程序(SUB2)
TASK#3・・・子任务3程序(SUB3)
TASK#4・・・子任务4程序(SUB4)
TASK#5・・・子任务5程序(SUB5)
TASK#6・・・子任务6程序(SUB6)
TASK#7・・・子任务7程序(SUB7)
TASK#8・・・子任务8程序(SUB8)
TASK#9・・・子任务9程序(SUB9)
TASK#10 ・・子任务10程序(SUB10)
TASK#11 ・・子任务11程序(SUB11)
TASK#12 ・・子任务12程序(SUB12)
TASK#13 ・・子任务13程序(SUB13)
TASK#14 ・・子任务14程序(SUB14) TASK#15 ・・子任务15程序(SUB15)

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-10-27 07:10:03
- 2022-11-01 14:27:03
- 2022-11-09 07:05:05
- 2022-11-09 09:58:04
- 2022-12-26 10:00:03
- 2022-08-03 10:20:40
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









