





移动焊接机器人的前世今生即发展史 上
时间:2017-05-17
阅读:8844
原创

机器人一词由捷克作家在 1920 年提出,经过多年的发展仍然对于机器人没有一个统一、准确的定义。人类总是希望开发自动化机械设备来代替人工去完成重复性或者恶劣环境下的工作,在这个大背景下,机器人技术得到快速发展。而后随着数字计算机和电子技术发展,在 20 世纪中期现代机器人已经逐步出现。随着 1959 年美国发明的第一台工业机器人问世标志着现代工业进入快速自动化生产时代,也掀起了世界各个国家对于机器人研究的热潮。
机器人按照发展程度分为以下几类:
(1)第一代机器人是示教——再现型工业机器人,出现时间较早,易于操作且成本低廉,现已广泛的应用于制造领域。
(2)第二代机器人是利用传感技术的机器人,机器人可在一定范围内感知周围环境的变化。
(3)第三代机器人是智能化机器人,可根据自身传感系统感知外界环境变化,并自主做出反应完成相关任务,这是目前机器人研究的主要方向。
(4)第四代机器人是情感型机器人,类似人类一样拥有一定的智慧和情感,这正是未来机器人发展方向。
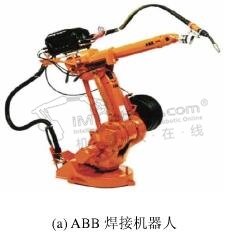

焊接机器人按照工作环境不同分为固定关节式和移动焊接式。如图 1.3 所示,为目前较为成熟的多轴关节型焊接机器人。图 1.3(a)中为 ABB 公司研发的六自由度焊接机械手,其可以通过运动学分析得出末端执行器姿态与各个运动关节电机关系,然后示教编程来模拟末端执行器的运动轨迹,完成复杂零件的焊接工作。其特点是工作环境要求高,主要在车间内进行焊接工作,重复性好,焊接质量可得到保障,因此广泛应用于汽车点焊、弧焊等行业。但由于底座固定并且机械手臂伸出长度一定,使其运动范围受限且只能焊接单一部件。为解决这一问题,如图 1.3(b)为常用焊接机器人工作站,可完成流水式焊接部件的不同位置,但机器人数量多成本较高,机器人本身自由度较多导致线束繁多,安装维修复杂。
焊接机器人
直角转弯移动焊接机器人结构设计与仿真
技术干货

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









