





焊缝跟踪技术及相关传感器 上

焊接作为金属加工业的“裁缝”在工业中起着至关重要的作用,它是一个结合了力、热、光、电的综合加工方法。随着工业的发展,人工焊接受到工作环境、劳动强度以及成本等影响逐渐被自动化焊接所取代。所谓自动化焊缝跟踪技术,是以焊枪为被控对象,通过传感测量技术得出焊枪相对于焊缝中心的位置偏差,经过计算机计算并用焊接机器人实时控制焊枪位置,校正偏差,使得焊枪在焊接过程中始终与焊缝对中,从而完成自动化焊接。
而焊缝识别传感器根据传感形式不同主要分为:接触式、非接触式、电弧传感式。
接触式传感器主要分为机械式和机械电子式,其主要原理是通过焊接机器人与坡口的物理接触把焊缝的相对位置变化转换为电信号。机械式是利用机构与焊缝接触,以焊缝形状作为导向。机械电子式是利用当焊缝与焊枪的中心存在位置偏差时,导杆自身能收到电信号,根据偏差的大小与方向,控制焊接机器人使焊枪对准焊缝中心位置。这类传感器结构简单、价格低廉,但是易造成机械磨损,长时间焊接使得传感精度变差,不利于自动化焊接。
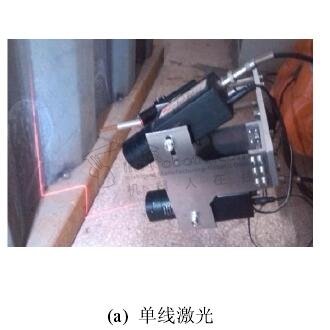
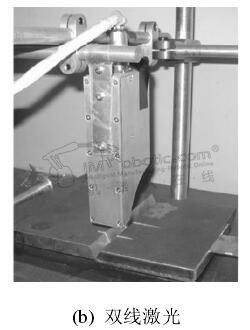
非接触式传感器在工业现场应用较为广泛。其中电磁传感根据电磁感应原理,通过磁感量参数变化反映位置偏差,但焊接过程中会产生强大的磁场影响电磁传感精度且其体积较大,灵活性较差。声学传感具有不受焊接过程中弧光、磁场等干扰等优点,但其对于周边环境要求较高,多与其他传感器配合应用。激光视觉传感作为光学传感中的一种被最广泛应用于现代焊接中,主要由CCD摄像头、激光发射器和滤光片组成。其优点是检测系统不接触焊接回路,可提取出焊缝的大量信息。如图 1.12(a)所示为华南理工大学搭建的单线激光视觉系统,可完成对于波纹板焊缝的识别。如图 1.12(b)为清华大学先进成形重点实验室针对单线激光难以克服的导前误差搭建的双线结构光传感器,实验验证了其可以克服导前误差。

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









