





焊接机器人运动路径优化仿真分析
时间:2017-05-23
阅读:8000

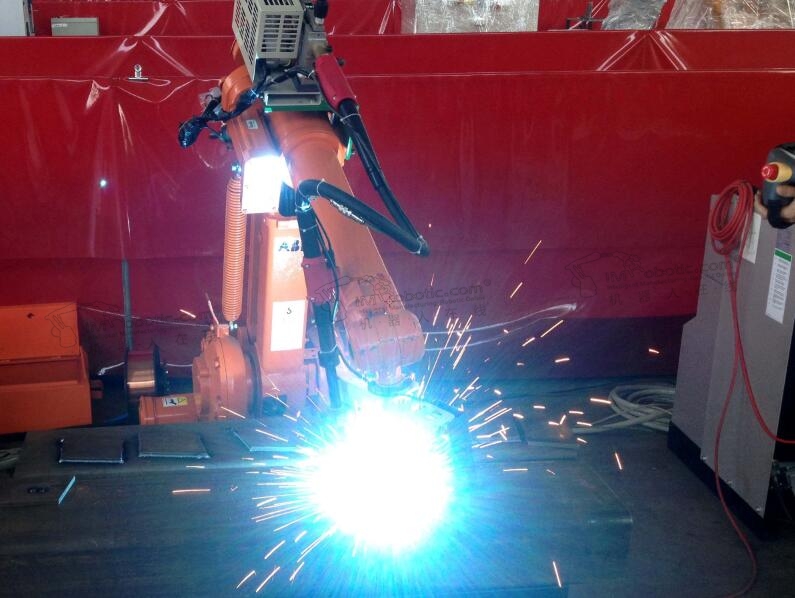
焊接机器人在提高产品的生产率、改善员工的工作环境和提升产品的质量这些方面有着重要的意义。目前焊接机器人课题的相关技术研究已经变得越来越重要。本课题针对的主要研究对象是工业上应用非常普遍的六自由度工业焊接机器人。把工厂的实际生产过程,与焊接机器人相关的理论结合,运用虚拟样机对焊接机器人的运动进行仿真并且优化从而提高生产效率和产品质量。
本系列文章针对六自由度焊接机器人路径优化角度出发,首先在工业机器人这个方向简单的做了一个概述,包括了工业机器人的构成、分类及发展状况。并且说明了工业机器人的发展趋势,这为本课题的研究工作做了充分的前期铺垫。其次本文详细的介绍了工业机器人结构的描述方法,包括了空间的描述,机器人坐标系的建立,及焊接机器人运动方程的正解及逆解的求解。运用 D-H 方法建立数学模型,并对运动路径进行优化。阐明了焊接机器人虚拟样机的模拟过程,例如,焊机机器人虚拟样机模型的导入,模型在 ADAMS 中的前期处理步骤,焊接机器人模型的检测,为接下来进行的仿真过程做好了准备。然后,利用机器人运动学理论和虚拟样机技术,从焊接工艺出发,依据焊接任务要求,结合相关虚拟模拟软件 ADAMS 及 ANSYS 联合对机器人的焊接运动过程完成了仿真分析求解及验证。最后,在工厂现有设备的基础上对焊接的运动的轨迹进行模拟,运用破坏性实验对焊缝的焊接质量进行检测。
焊接机器人
焊接机器人运动路径优化仿真分析
技术干货

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









