




焊接机器人的视觉系统标定方法研究 中

焊接机器人下面进行具体的坐标转换关系计算,首先计算图像坐标系和像素坐标系的转换关系,已知点P’在图像坐标系上坐标为(x,y),在像素坐标系上坐标为(i,j)图像坐标系中的圆心o在像素坐标系下的坐标为(ik,jk),实质上两坐标系在同一个平面上。当令dx和dy为单位像素在x, y方向上的大小时,可得:

下面计算相机坐标系和图像坐标系的转换关系。已知点P在相机坐标系下的坐标为(Xc,Yc Zc ),而点P在通过小孔成像模型后在图像坐标系上投影为P',且在图像坐标系上坐标为(x,y),通过图3-1,我们可以得出
.jpg)
其中f为相机的焦距。
最后计算世界坐标系和相机坐标系的转换关系,根据点P在世界坐标下坐标为(Xw,Yw,zw),同时点P在相机坐标系下的坐标为(Xc,Yc,Zc)同一点在两个不同坐标系下的坐标不同,可得:
.jpg)
单目相机的标定参数
相机的标定分为内参数标定和外参数标定,内参数为相机的光学和几何参数,一般有焦距、坐标像素放大因子、图像坐标原点以及若是非线性模式还有畸变系数,而外参一般为相机坐标系相对于世界坐标系的位姿即旋转和平移关系。根据式(3.1) (3.2) (3.3)联立可求得空间坐标系下的空间点P与该点投影到图像传感器上在像素坐标系下坐标的转换关系:

如公式(3.4)所示,则若不考虑畸变则内参矩阵为C1外参矩阵为C2,且内参数由a、b、ik、jk所决定,a=f/dx,b= f/dy,外参数由两坐标系的平移矩阵t和旋转矩阵R所决定。
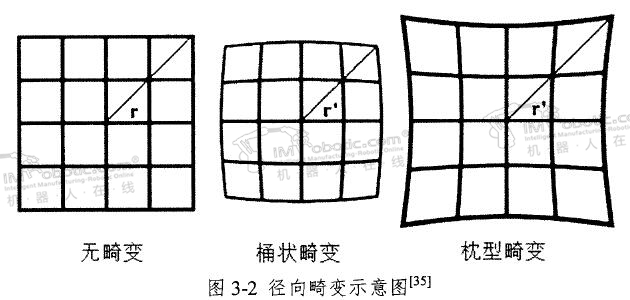
若考虑因相机光学系统存在的无法避免的加工误差或者相机工作过程中相机与被测物体距离过近而产生图像畸变,则此时相机模型为非线性模型。相机畸变主要分为切向、径向和薄棱镜畸变。通常径向畸变是影响图像效果的主要因素,因此在本例中对畸变的处理也是针对径向畸变。径向畸变由于镜头径向曲率不同分为枕型和桶状畸变,如图3-2所示。
焊接机器人
在图像处理学发展中,有很多研究是针对于径向畸变的移除,绝大部分是用射影几何法,该方法通常需要已知的标定点,Tsai将已知维度的网格的角点做为该标定点,Faig则只需要共面的一些点,而Wei和Ma则利用投影不变了去移除畸变。在本项目中,如图3-1所示,P'为空间点P在图像传感器上理想投影点,但可能由于畸变,实际投影点为P'周围的P"。现规定P'’的坐标为((xd,Yd),P'坐标为((x,y),此时令r2=x2+y2。则根据畸变的非线性关系,若只考虑径向畸变,则可得:
.jpg)
因此,在考虑单目相机的标定参数时,若相机是线性模型不考虑畸变时,则内参为之前计算得出的a,,b,ik,jk,若相机是考虑畸变的非线性模型,还需加上k1,k2,k3。外部参数则始终一致,是世界和相机两坐标系的平移矩阵t和旋转矩阵R。

好的文章,需要您的鼓励
2

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









