





焊接机器人的视觉系统标定方法研究 下

焊接机器人双目立体相机的标定研究双目相机的标定模型
本项目中的视觉采集系统是利用两个光轴成一定夹角光心成一定距离的相同型号相同焦距的CCD相机加上激光发生器组成。按之前的推导,利用单目相机获得空间三维坐标和平面二维坐标的转换关系,需要通过标定步骤,那么同样,双目立体视觉系统也需要进行标定。如图3-3所示为双目视觉系统示意图。
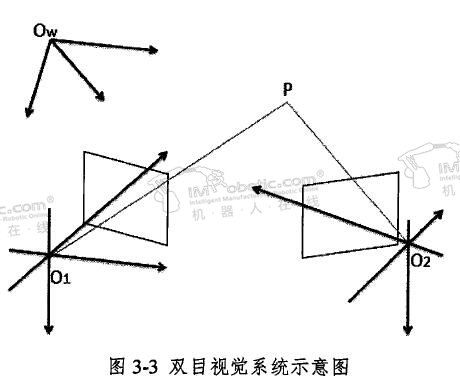
根据图3-3,已知点P为空间中的一个特征点,点P在世界坐标系(Ow-XwywZw)下坐标为Pw(Xw, Yw, Zw),同样图3-3中还存在着两个相机坐标系分别为(Oi-XiYiZI)和(O2-X2Y2Z2),空间点P在两相机坐标系下的坐标分别为P1(X1, Y1, Z1)和P2 ( X2, Y2, Z2)。则根据空间中坐标系的转换计算,可得下列数学式:

联立式(( 3.6)和式(3.7),可得:

其中![]() 且R与T为两相机之间的位姿矩阵,所以通过(3.8)我们可以得出这个结论,若是分别完成两相机的标定,然后通过该公式计算,则可以得出整个双目系统的外参数,双目系统的内参数则是各个子相机的内参数。但是再进行双目系统的标定时,标定的参照物应该为两相机同时拍摄所处理的,若是在安装好双目系统后,分别对两相机独立进行标定,标定参照物的拍摄也不对应,则并不能得到可靠结果。经过上述讨论,我们可以知道,双目系统标定的精确度和速度取决于单目相机的标定的精度,所以提升单目相机的标定速度和准确度,得到稳定可靠的单目相机的内外参数,就可以通过求得的两相机的内外参数来获取双目系统的外参。所以针对双目系统标定的优化,着重点应该放在单目视觉上,这样既简化了工作,又因为计算量的减少而减少了累积误差。所以后续关于标定部分的研究是基于单目视觉来进行,然后测得多种单目视觉的标定参数,然后基于式(3.8)得出双目标定数据。
且R与T为两相机之间的位姿矩阵,所以通过(3.8)我们可以得出这个结论,若是分别完成两相机的标定,然后通过该公式计算,则可以得出整个双目系统的外参数,双目系统的内参数则是各个子相机的内参数。但是再进行双目系统的标定时,标定的参照物应该为两相机同时拍摄所处理的,若是在安装好双目系统后,分别对两相机独立进行标定,标定参照物的拍摄也不对应,则并不能得到可靠结果。经过上述讨论,我们可以知道,双目系统标定的精确度和速度取决于单目相机的标定的精度,所以提升单目相机的标定速度和准确度,得到稳定可靠的单目相机的内外参数,就可以通过求得的两相机的内外参数来获取双目系统的外参。所以针对双目系统标定的优化,着重点应该放在单目视觉上,这样既简化了工作,又因为计算量的减少而减少了累积误差。所以后续关于标定部分的研究是基于单目视觉来进行,然后测得多种单目视觉的标定参数,然后基于式(3.8)得出双目标定数据。
基于二维标定物的标定方法介绍
在实际的标定过程中,随着近些年的研究与发展,产生了很多种不同的标定方法,主要分为以下两类:基于标定物的标定和无需标定物的自标定。基于标定物的标定的主要工作原理是墓于摄影测量方法,利用标定物上的已知点通过约束条件获取相机的内参和外参。基于标定物的标定方法也主要分为三类,分别为基于三维标定物的标定技术、TSAI两步标定法和基于平面标定物的张氏标定法。而自标定法则是在面对相机焦距时常调整或相机相对位置经常移动时为了避免每次要对相机手动进行重新标定而使用的标定技术,最早是由Faugeras等人提出的求解图像中存在Kruppa方程的非线性约束方法来求解内参。但是该方法首先计算参数过多,其次鲁棒性不好,最重要的是本项目是相机和执行机构是固连的,所以相对位置不变,所以无需对自标定方法做过多探究。
在基于标定物的标定方法中,由于张氏标定标定方法简单、标定成本低且其改进版本被广泛应用于opencv, halcon或matlab等图像处理库方法中,所以在实际工程中应用最广。张氏标定的方法主要如下:
该方法采用二维模板,且假设世界坐标系(Ow-XwYwZw)位于模板平面,Zw为0.当用r;来代替R时,可以将式(3.4)改写为下列形式:
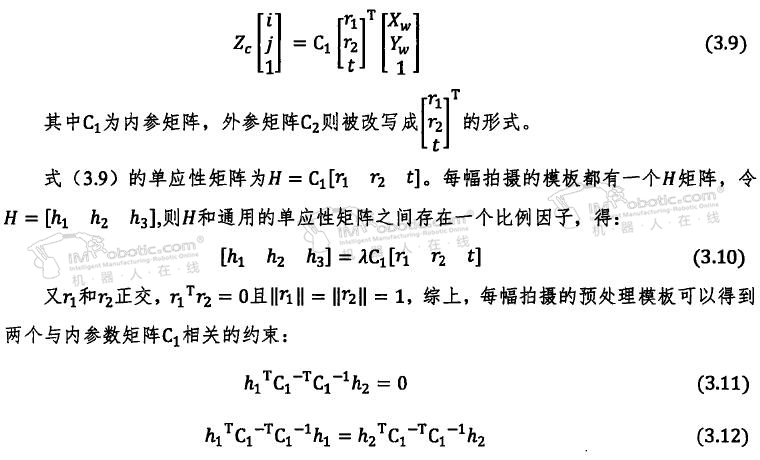
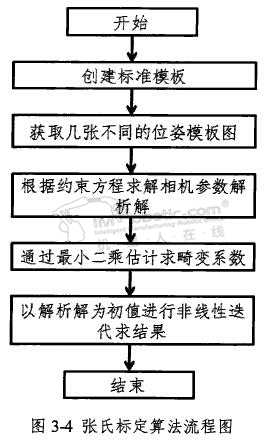
焊接机器人同时可知![]() 为对称矩阵,因此可以用一个6维向量来g来表示。如果采集标定n副图像,就可以构成2nx6个矩阵,只要n>3就可以得到g,继而可以得到初步的相机内外参数,再以这些参数作为初始值,应用相关算法进行非线性优化估计出最终结果,如果需要考虑畸变,则在进行非线性优化步骤之前,首先要利用一些数学统计方法如最小二乘法求出畸变系数。整个张氏标定的流程如下图所示:
为对称矩阵,因此可以用一个6维向量来g来表示。如果采集标定n副图像,就可以构成2nx6个矩阵,只要n>3就可以得到g,继而可以得到初步的相机内外参数,再以这些参数作为初始值,应用相关算法进行非线性优化估计出最终结果,如果需要考虑畸变,则在进行非线性优化步骤之前,首先要利用一些数学统计方法如最小二乘法求出畸变系数。整个张氏标定的流程如下图所示:

好的文章,需要您的鼓励
13

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









