





PR1400机器人小臂危险姿态分析
时间:2017-07-04
阅读:6906
原创

PR1400焊接机器人小臂危险姿态分析
(1)小臂危险姿态确定
在确定小臂的危险姿态时,首先要先将腕部固定在其危险姿态即水平位置。其过程与腕部危险姿态确定过程相似,J4轴的运动范围为-180度到180度,即可以360度旋转。设置仿真位置为-180度,驱动速度为1°/s,仿真时间为360s。小臂在J4轴转动各角度所受力与力矩曲线如图2. 16所示。
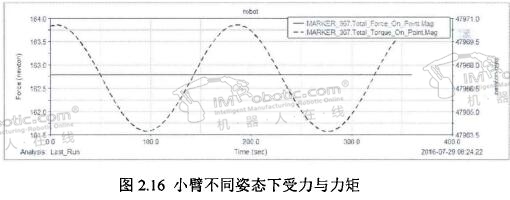
由图可看出,小臂受力在整个运动过程中几乎保持不变,而力矩成类正弦曲线。当其位于初始位置或转过180度时为受力及力矩最大的位置,此时小臂处于竖直或水平状态。
(2)小臂危险姿态下受力分析
小臂承受其腕部对其的作用力、力矩及自身的重力。自身的重力保持不变,因此只要测出此姿态下腕部对小臂的作用力及力矩即可。将肘部调到最危险姿态,得出手腕体对小臂作用力如图2. 17所示,作用力矩曲线如图2. 18所示。
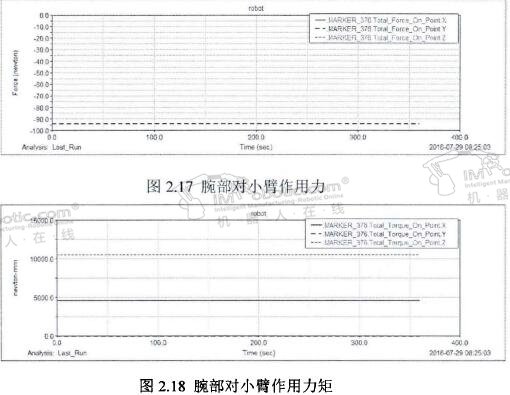
由图2.17可知小臂在最危险姿态下,腕体对小臂X方向作用力力为0N, Y方向作用力为-94. 08N, Z轴方向作用力为0N。其中负号表示为压应力。
焊接机器人由图2. 18可知小臂在最危险姿态下,腕部对小臂X方向作用力矩为4648N. mm,Y轴方向作用力矩为ON. mm, Z轴方向作用力矩为10568N. mm,其中力矩方向均为顺时针。
焊接机器人
PR1400型焊接机器人结构优化与精度补偿
技术干货

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-18 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18 -
搬运机器人和叉车哪个好?优劣势分析
关键字: 搬运机器人 叉车 优劣势 2024-09-14 -
机器人涂胶工作站主要包括哪些设备?工作原理是什么
关键字: 机器人 涂胶 原理 2024-09-14 -
STRP方案重磅登场!接力天团来袭,绝对实力王炸商业仓配赛场!
关键字: 海康 机器人 strp方案 2024-09-13
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-18
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-13
- 2024-09-14
- 2024-09-12
- 2024-09-11
- 2024-09-10
- 2024-09-05









