





焊接机器人的基于多目标函数的优化方法及程序设计

2.4优化方法及程序设计
2.4.1基于多目标函数的优化方法及程序设计
焊接机器人根据本文的函数及约束条件,此类问题属于多目标函数约束非线性规划问题,运用MATLAB工具箱中的fgoalation函数进行多目标规划求解。多目标函数的模型为
.jpg)
.jpg)
将优化后的结果重新编程,不平衡力矩随着关节角![]() 的变化而变化,用matlab的mesh函数画出不平衡力矩三维图如图2.8所示,它显出了不平衡力矩的变化趋势。
的变化而变化,用matlab的mesh函数画出不平衡力矩三维图如图2.8所示,它显出了不平衡力矩的变化趋势。
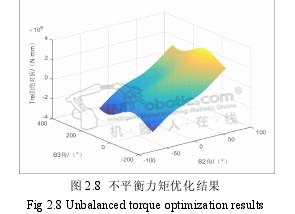
优化后弹簧的劲度系数变小,弹簧钢系统成本变低,整个系统的不平衡力矩减小。不平衡力矩的差值的最大值![]() ,由图2.7和图2.8可以看出,差值变小。
,由图2.7和图2.8可以看出,差值变小。
将结果数值进行实验,满足实验要求。经分析表明:1、不平衡力矩的最大值降低;2、不平衡力矩在优化后,波动平缓,使运动更加稳定。
2.4.2优化系统开发与验证
matlab中GUI是一种用户图形界面开发。界面制作包括界面设计和程序实现。具体制作步骤如下:根据焊接机器人的优化目标,将需要的功能在其界面上绘制出来,在通过后台编程开发出其基于165kg工业机器人平衡系统优化模型平台。该优化模型平台的主要功能将机器人初始参数输入后,输出优化好的参数,并在此基础上验证是否满足焊接机器人的电机要求。或者将优化好的数据直接输入进去,看是否满足电机要求。本文主要应用后一个功能。
把焊接机器人平衡系统开发成优化模型平台,如图2.9。将优化后的数据带入开发好的平衡系统优化平台中,验证是否满足电机要求。 2.4.2优化系统开发与验证
matlab中GUI是一种用户图形界面开发。界面制作包括界面设计和程序实现。具体制作步骤如下:根据焊接机器人的优化目标,将需要的功能在其界面上绘制出来,在通过后台编程开发出其基于165kg工业机器人平衡系统优化模型平台。该优化模型平台的主要功能将机器人初始参数输入后,输出优化好的参数,并在此基础上验证是否满足焊接机器人的电机要求。或者将优化好的数据直接输入进去,看是否满足电机要求。本文主要应用后一个功能。
把焊接机器人平衡系统开发成优化模型平台,如图2.9。将优化后的数据带入开发好的平衡系统优化平台中,验证是否满足电机要求。
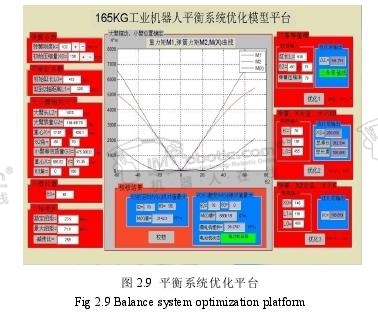
参数的校核是指对关键参数选取后,通过计算找到工业机器人的大小臂何种姿态时不平衡力矩是全姿态里的最大值,根据C轴减速器的选取,算出此种姿态时需要驱动电机的最大额定功率,以及判断电动机的选取是否合格。
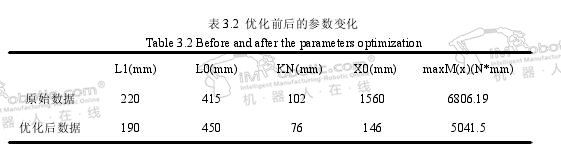
将优化好的数据带入优化系统中,由表3.2的数据可以得出,原始的参数被优化后,所得的最大不平衡力矩M(x)减少了26.9%,图2.9为校核的显示界面,界面显示所选取的电动机合格。
针对焊接机器人弹簧平衡缸的参数变化对工业机器人的不平衡力矩的影响,对其关键参数进行了相关的实验与测试。为提高工业机器人的工作性能与效率,本文对平衡缸造成的不平衡力矩参数的影响进行了分析及优化。在工业机器人重力参数和结构参数研究与测试的基础上,推导出工业机器人的不平衡力矩。得出各个参数对不平衡力矩的影响,以及机器人的运动学、动力学特性。构造参数相应的的约束条件和目标函数的非线性约束条件,结合多目标函数优化模型并对工程实例进行优化。最后,对优化前与优化后的结果进行对比分析,得到了相应的优化效果。实验结果表明,优化结果满足实验要求。优化后,不平衡力矩的最大值降低,机器人运动更加稳定,利用matlab工具箱中多目标函数进行了优化而且优化结果更精确。并通过165kg工业机器人系统优化模型平台对其进行检验,检验后满足电机要求,证明了焊接机器人平衡缸的优化对电机的选取也有帮助。优化系统具有有效性和实用性。

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









