





基于视觉的CO_2焊接机器人焊接工艺参数与熔池形态关系的研究中图像采集系统的建立

2. 4. 3滤光片的选择
焊接机器人在焊接过程中由于飞溅等因素的影响,得接过程中熔池在线检测相对干扰较多。机器人视觉传感,使得弧光干扰更为严重,焊接弧光太强会使得熔池有关信息被俺没,因此很难获取相应的熔池的信息。而在被动式图像采集中,焊接过程中的焊接区域存在着镜面反射与弧光漫的反射,其中焊接中的镜面反射是由熔池之中所熔化的金属造成,而弧光的漫反射是在没有熔化的区域为主。在焊接过程中想要拍摄到清晰的熔池图像,其中弧光镜面反射和漫反射所形成的明与暗对比明显的两个区域是必须的。因此选择滤光片,来降低焊接过程中的强烈的弧光干扰十分必要。要想获取清晰的熔池图像,合适的选取滤光片非常必要,因为整个
滤光系统能够很大幅度的降低弧光的干扰,从而使得熔池图像的信噪比提高。
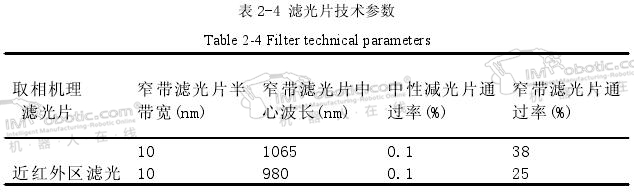
视觉中的滤光系统是由窄带滤光片与中性减光片组合而成的复合滤光系统。如表2-4为中性减光片与窄带滤光片主要的技术参数。滤光系统在机器人焊接过程中,可以减小焊接过程中强烈电弧光的影响和提高熔池图像的信噪比,从而选择适合的光信号的接收窗口。为了能够良好的拍摄到图像,本实验室使用峰值是650mm,带宽是20mm的窄带滤光片和透光率是10%的中性减光片组合成的复合滤光系统。
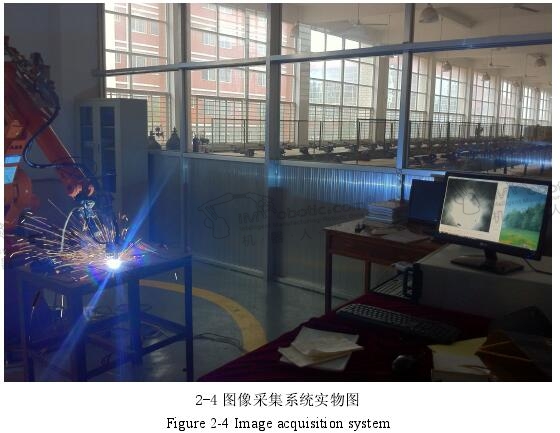
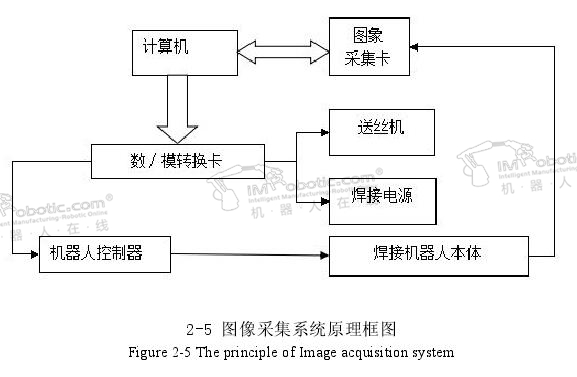
本文实验采用被动式视觉传感,直接的利用弧光和辐射光作为光源信号,不加入任何辅助光。机器人视觉图像采集系统的组成:ABB工RB1400焊接机器人、焊机控的制箱、焊接电源、计算机、图像采集卡、ccd摄像机,computar镜头、滤光片、焊接台等。如图2-4所示,在焊接机器人末端手臂上安装一个ccd摄像机,焊接过程中摄像机与熔池距离相对较近,能够捕捉到相对近似实际情形、相对误差较小的熔池图像。镜头的末端加上窄带滤光片和减光片,用来降低强光飞溅等等不良因素的干扰。在焊接过程中,熔池区域热辐射光线经过近红外复合滤光片及弧光反射原理消除弧光的干扰。ccd将捕捉到的熔池的图像信号传输到图像采集卡,然后把其转换成数字信号输送到计算机,经一系列处理后能够得到清晰的熔池图像。其工作原理图如2-5所示。
2. 5本章小结
(1)分析介绍了文章所用的数字图像处理技术的发展概况,特点等。
(2)分析了基于二氧化碳气体保护焊接熔池的特点。
(3)焊接试验台以及熔池图像采集系统的搭建,着重介绍了基于二氧化碳焊视觉系统的组成以及原理。
.jpg)

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05


- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









