





光幕机器人X、Y轴外形检测硬件设计
时间:2017-09-13
阅读:7629

3. 3. 2光幕检测硬件设计
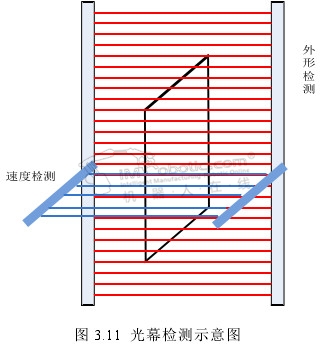
喷涂机器人光幕检测硬件系统主要包括速度检测与外形检测。速度与外形检测均采用光幕技术,建立水平方向光幕为x轴速度光幕,垂直方向为Y轴外形光幕。
外形检测系统硬件构架大致如图3.11所示,
3. 3. 2. 1 X轴速度检测设计
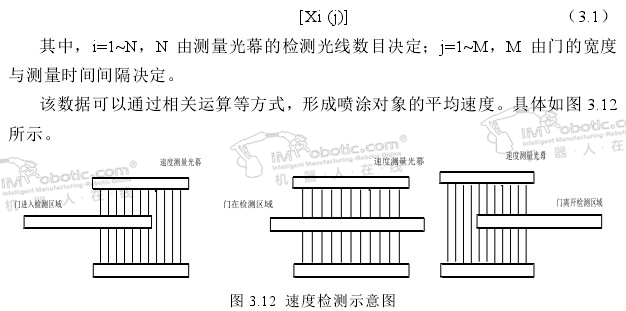
速度检测通过水平安装的X轴速度光幕检测喷涂对象边缘的运动速度,从而获取喷涂对象的平均行进速度。喷涂对象的运动平均速度可以通过对喷涂对象进入检测区域时刻的速度,与离开检测区域时刻的速度进行平均得到。检测所得的数据为一个[0,1]组成的数据矩阵,该速度数据可以表示为一个[0,1]组成的数据矩阵,表示了光线的遮挡情况:
3. 3. 2. 2Y轴外形检测设计
获取喷涂机器人喷涂对象速度后,喷涂对象以一定速度进入Y轴外形检测光幕,系统按照一定的时间间隔T,读取光幕的遮挡情况,则可以获取喷涂对象的外形列数据,数据方式与速度光幕相同。利用该数据矩阵,并结合速度光幕计算转化所得喷涂对象运行速度,便可获取所有喷涂对象外形数据。
喷枪喷出的油漆有一定的覆盖范围,并考虑喷涂现场情况以及工艺要求,系统的检测精度要求不高,系统设计检测精度为±20mm。
3. 4系统数据处理与软件设计
根据分析系统结构及需求,具体功能结构如图3.13所示。
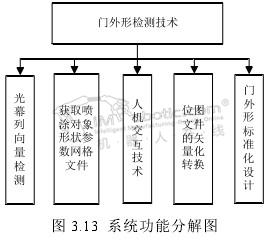
数据处理与软件设计主要内容按功能分解为五类:光幕列向量检测,获取门外形参数网格文件,人机交互技术,位图文件的矢量化转换,门外形标准化设计。

喷涂机器人,基于光幕的喷涂机器人系统设计与研究
技术干货

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
abb机器人维护有哪些部件及作用
关键字: abb机器人 维护部件 2024-05-31 -
发那科机器人skip指令应用及操作
关键字: 发那科机器人 skip指令 2024-05-29 -
abb机器人离线编程软件的优缺点分析
关键字: abb机器人 离线编程 优缺点 2024-05-27 -
机器人离线编程的优势与劣势分析
关键字: 机器人 离线编程 优劣势 2024-05-23 -
机器人完成涂胶的方法和步骤
关键字: 机器人涂胶 方法 步骤 2024-05-21
-
发那科机器人怎么接通外围信号?
标签: 发那科机器人,外围信号 提问:许愿 2024-05-29 10:15:05 -
ABB机器人Socket通讯的配置步骤
标签: ABB机器人,Socket通讯 提问:舒客 2024-05-27 11:26:02 -
发那科机器人计数器如何设置?
标签: 发那科机器人,计数器,设置 提问:莱恩 2024-05-21 10:07:07 -
发那科机器人skip指令应用
标签: 发那科机器人,skip指令 提问:七里香 2024-05-21 09:59:56 -
abb机器人获取xyz坐标的方法?
标签: abb机器人,获取坐标 提问:奇奇 2024-05-17 13:14:04

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-03 10:20:40
栏目推荐
- 2024-05-31
- 2024-05-29
- 2024-05-27
- 2024-05-23
- 2024-05-21
- 2024-05-17
- 2024-05-15
- 2024-05-13
- 2024-05-10
- 2024-05-09









