





【机器人培训】安川机器人基础操作培训第五期来啦!
时间:2024-05-09
阅读:5093

欢迎大家来到安川机器人基础操作培训线上课堂第五期!
上节课我们学习了程序的新建、复制、删除和重命名等操作,本节课继续带您学习示教编程相关的基础知识,着重掌握安川工业机器人的插补方式及示教点位变更操作。
本期要点
▶ 安川工业机器人的插补方式介绍
▶ 插补方式变更及修改速度操作
▶ 安川工业机器人示教点位变更操作
插补方式介绍
机器人再现运行时,用来决定程序点之间的移动轨迹的方法叫“插补方式”,此时的移动速度叫“再现速度”。
安川工业机器人的插补方式有以下4种:
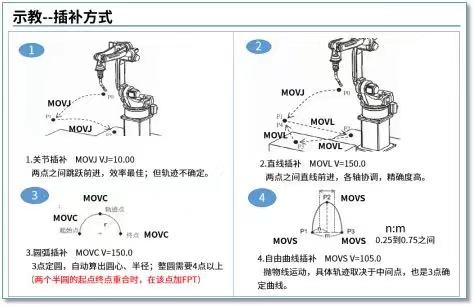
▲安川工业机器人关节插补、直线插补和圆弧插补方式介绍,该视频为安川电机和机器人在线共同开发
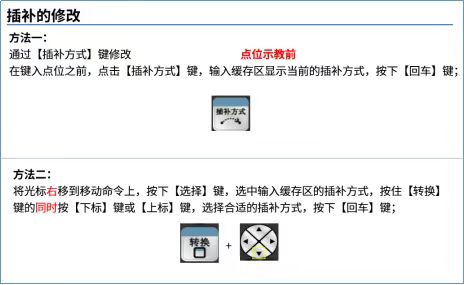
插补方式变更及修改速度操作
程序再现时,会按照插补方式和再现速度运行。那么现场实际操作过程中,我们如何来修改插补方式和再现速度呢?
常用的插补方式变更操作,有以下2种:
插补方式相关的速度修改操作,在实际运用中存在多种情况。相关操作已经归纳总结为一个视频,详见下方。
▲插补方式变更以及速度修改操作
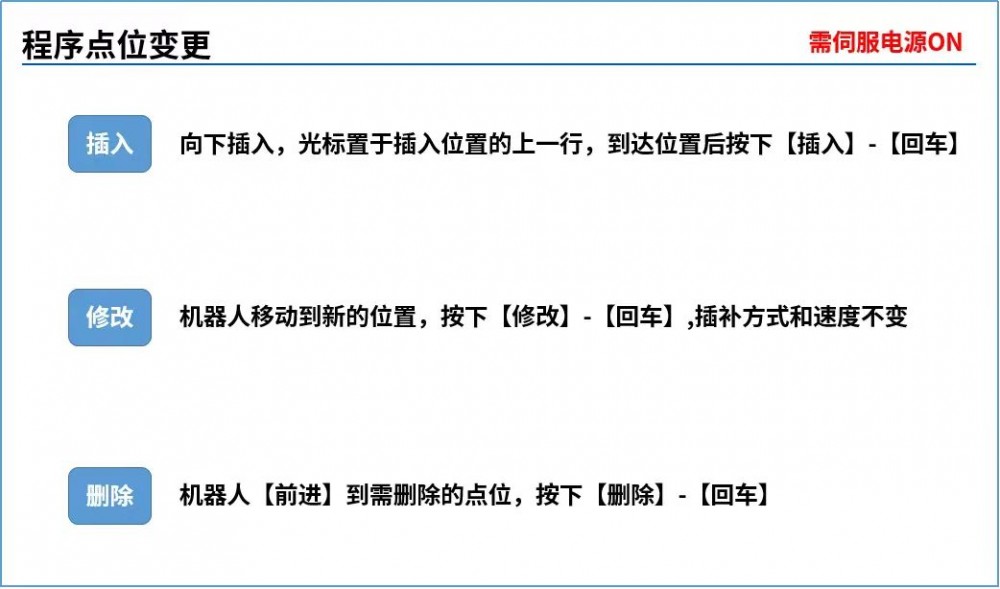
示教点位变更操作
如果我们想要变更已示教的点位,常见的有以下3种操作:
示教点位变更操作,也已经归纳成一个视频,详见下方。
▲点位的插入、修改和删除操作
基础操作培训线上日程表

更多机器人相关资料下载
还想了解更多机器人相关资料?
请扫描下方二维码
所有机器人资料一网打尽!

安川
机器人

好的文章,需要您的鼓励
4

- 最新资讯
- 最新问答
-
工业用急停开关什么牌子好,优势有哪些?
关键字: 急停开关 品牌 优势 2024-06-13 -
工业机器人的急停装置装在什么位置?如何启动?
关键字: 急停开关 安装位置 如何启动 2024-06-11 -
伺服驱动器重要参数的设置方法和技巧
关键字: 伺服驱动器 参数设置 2024-06-06 -
abb机器人系统如何添加选项及内容
关键字: abb机器人系统 添加内容 2024-06-04 -
abb机器人维护有哪些部件及作用
关键字: abb机器人 维护部件 2024-05-31
-
IDEC/和泉安全开关怎么样?
标签: IDEC,和泉,安全开关 提问:极客 2024-06-11 13:41:07 -
安川机器人原点丢了如何恢复
标签: 安川机器人,原点恢复 提问:泡奶 2024-06-05 13:18:02 -
abb机器人无法创建系统
标签: abb机器人,创建系统 提问:积雪 2024-05-31 11:30:05 -
abb机器人profinet通讯设置
标签: abb机器人,通讯设置 提问:小二 2024-05-30 10:06:03 -
发那科机器人怎么接通外围信号?
标签: 发那科机器人,外围信号 提问:许愿 2024-05-29 10:15:05

推荐
安川电机(中国)有限公司
 5年
5年



相关资讯
相关问答
- 2021-05-14 13:36:48
- 2019-09-27 11:29:38
- 2022-06-27 10:05:41
- 2020-08-17 15:11:43
- 2019-01-25 11:08:57
- 2020-10-16 13:27:55
- 2022-08-24 12:09:31
- 2018-07-18 16:14:08
- 2022-08-30 15:17:40
- 2022-08-24 14:16:37
- 2022-09-13 12:17:35
- 2023-09-01 10:16:04
栏目推荐
- 2024-06-11
- 2024-06-06
- 2024-06-04
- 2024-05-31
- 2024-05-29
- 2024-05-27
- 2024-05-23
- 2024-05-21
- 2024-05-17
- 2024-05-15









