





焊接机器人径向伸缩机构
时间:2017-10-24
阅读:8832


径向伸缩机构
径向伸缩机构采用滚珠丝杠—U型线性滑轨导轨移动,径向关节也为移动关节,主要是为了实现焊枪随着焊道填充叠加而自动升高。主要机构和周向摆动机构基本相同,也主要由电机、滚珠丝杠、直线滑轨等组成,不同的地方就是有一个焊枪夹持器组成,如图3-11所示。
焊枪夹持器,又名加长型焊枪调节支架,该机构由上下移动座、左右移动座、横杆和立杆所组成。可依据焊接的位置,对焊枪进行上下行程,左右行程的移动,焊枪还可以通过旋转手阀进行0~360度的旋转。

大直径管道焊接机器人三维模型的建立
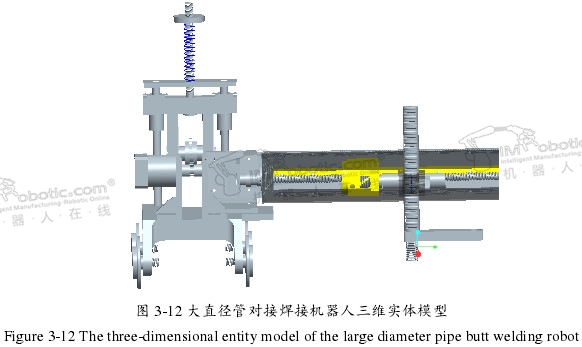
在上文分析设计各个零部件的基础上,利用Pro/E4.0对上文设计的车体、张紧机构、钢带、横臂、调整架及选取的零部件进行装配,得到了大直径管对接焊接机器人的三维实体模型(如图3-12所示)。
小结
本章先提出了机械本体设计方案,分别对驱动方式、传动方式和总体结构进行了设计和选取;在此基础上根据实际工作要求设计了大直径管对接焊接机器人的机械本体结构,并根据工作要求选取了联轴器、减速器及驱动电机等零部件;最后在Pro/E4.0里组装了以上设计或选取的零部件,完成了大直径管对接焊接机器人的三维实体模型的建立。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









