





焊接机器人运动轨迹仿真
时间:2017-10-30
阅读:11140


焊接机器人运动轨迹仿真
机器人运动轨迹规划
要对焊接机器人运动轨迹进行仿真,首先要弄清楚机器人轨迹规划.机器人轨迹规划是机器人底层规划,基本上不涉及人工智能的问题,而是讨论机器人在关节空间和笛卡尔空间中运动轨迹规划和生成方法。不论在关节空间还是在笛卡尔空间,其规划的轨迹函数都必须是连续平滑,以保证机器人运动的平滑。在关节空间进行规划时,是将关节变量表示为时间的函数,并规划它的一阶和二阶时间导数;在笛卡尔空间进行规划是指将手部位姿、速度和加速度表示为时间的函数,而相应的关节位移、速度和加速度由逆运动学导出
关节空间轨迹规划通常是只给出机器人末端的起始点和终到点,有时也会给出一些中间路径点。其主要工作是对关节变量的插值运算,方法简单,不会产生奇异位置.如果要求绕过障碍物或要求机器人末端按预定路径运动,那么就要采用笛卡尔空间法进行规划.通常机器人末端的运动轨迹是根据任务的需要设定的,按照一定的采样间隔,通过逆运动学计算,将其变换到关节空间,寻找合适的光滑函数来拟合这些离散点
前文提及的机器人正运动学和逆运动学仿真实例都是两点间的运动.下面将讨论机器人在笛卡尔空间的样条曲线运动轨迹仿真问题.
按照第二章中关于空间中刚体描述方法,任意刚体相对参考坐标系的位姿可由与它固接的坐标系来描述的.其上任意一点用相应的位置矢量和方向余弦表示.在笛卡尔坐标系中,机器人末端位姿可以用一系列节点来表示,相应的关节变量可用运动学逆解程序计算。因此,轨迹规划的首要问题就是如何在由两结点所定义的起始点和终止点之间生成一系列中间点。两结点之间最简单的路径是在空间沿直线移动或绕某轴转动,也可以包括椭圆、抛物线和正弦曲线等轨迹本文采用三次B样条插值的方法进行插值运算。通常,三次B样条曲线可用以下方程表示:
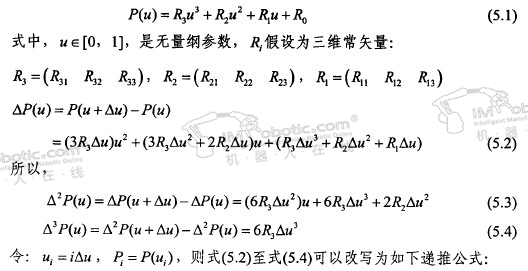

从式(5.5)可以看出,只有初始条件的计算包含乘法,可以在差补之前预先求出,而在求差补点的递推过程中只有加法运算,因而算法具有高速性.所以,只要选择合适的参数增量,总能保证插值误差,满足运动控制的精度要求。
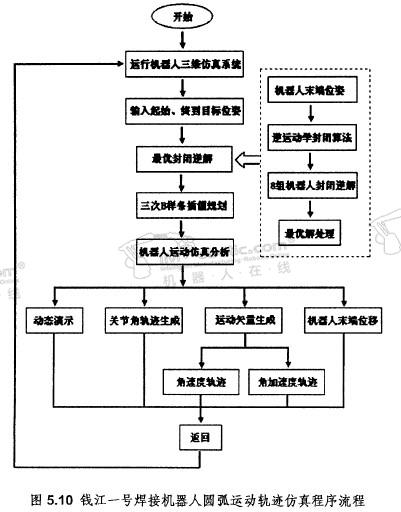
机器人运动仿真程序
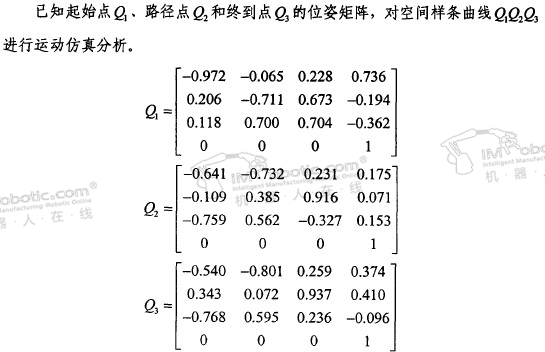
在给定机器人末端位姿条件下,采用前面提出的逆运动学封闭算法,求出8组封闭逆解.通过比较相邻点间的最短距离对其进行最优处理得到一组最优解,然后用三次B样条插值方法进行规划,对机器人运动涉及的关节角轨迹、角速度和角加速度时间曲线以及机器人末端位移进行仿真.
仿真程序流程如图s.10所示.
机器人空间样条曲线运动仿真分析

1仿真说明
运行环境:Windows XP操作系统Matlab6.5
逆解算法:基于旋转子矩阵正交的6R机器人运动学逆解算法
规划方法:三次B样条
时间设定:运动时间为6秒,采样间隔为0.1秒
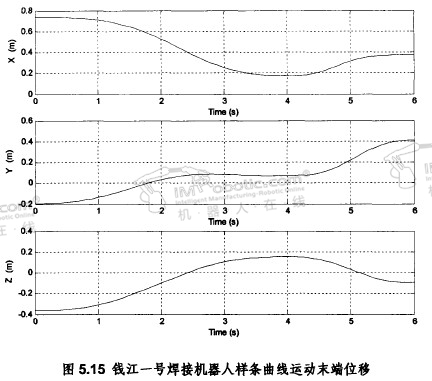
仿真内容:机器人空间样条曲线运动各关节角位移、关节角速度和关节角加速度时间曲线、机器人样条曲线运动末端位移
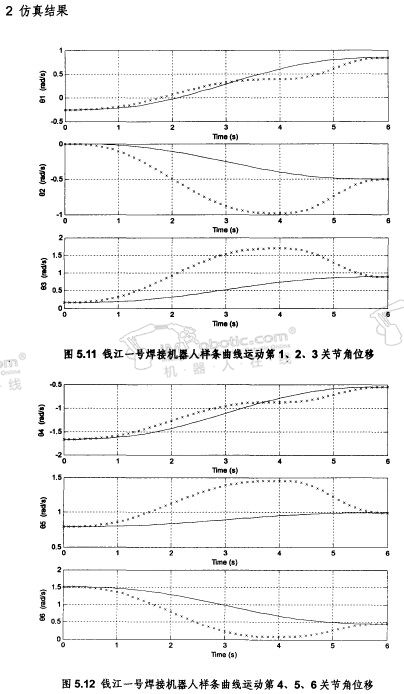
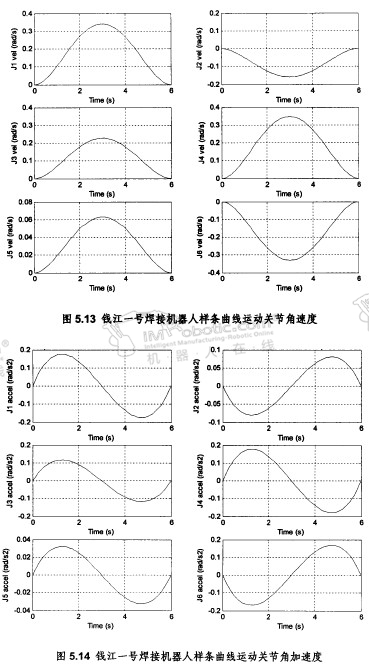
3仿真结果分析
1)从仿真结果对样条曲线各节点的运动量和时间变化的曲线可以看出,·在机器人运动过程中,各运动关节的角速度时间曲线、角加速度时间曲线变化都是连续缓和的,特别是加速度曲线没有突变的情况.这说明机器人在运动过程中运行平稳,没有冲击现象.
2)图5.11和图5.12中,“交叉号”表示基于三次样条插值和样条曲线经由路径点Q2时的关节角数值和轨迹;而“实线”则表示直接由起始点到终到点Q3的关节角数值和轨迹。
3)由图5.11到图5.14可知,各关节的仿真统计数据如下:

对比表5.1和表5.2,样条曲线仿真中机器人各关节运动时的极值速度和极值加速度均小于机器人限制速度和限制加速度;对比表3.2,机器人各关节角运动范围均在机器人最大允许工作范围之内,验证工作任务合理;对比样条曲线的起始和终到位置,机器人仿真结果与给定条件一致,封闭算法生成的关节角完成的姿态与目标姿态一致。
4)通过仿真,可以看出基于Matlab的钱江一号焊接机器人三维图形运动仿真能够较好的反映出机器人的实际运行情况。
小结
本章主要介绍了基于Matlab的钱江一号焊接机器人运动学三维仿真系统.首先讨论了有关机器人三维仿真系统的相关问题,给出了机器人仿真的一般程序流程、图形仿真系统的结构框架和机器人运动学三维仿真研究的现状;接着介绍了Matlab机器人工具箱,给出了钱江一号焊接机器人运动学模型,并以此为基础设定了一系列的参数(位姿、外形和结构等),生成了机器人驱动力矩,最终得到机器人三维仿真图形.
钱江一号焊接机器人三维仿真系统共分为机器人正运动学、机器人工作空间、机器人逆运动学、机器人运动轨迹、雅可比矩阵和综合仿真演示六个部分.文中详细介绍了各个部分实现的功能和操作方法.系统中,机器人运动轨迹仿真是本章的重点和难点.采用前文提出的封闭逆解算法和三次B样条插值规划的方法,对空间样条曲线运动进行运动仿真分析,得到了各关节角位移、关节角速度和关节角加速度时间曲线以及机器人末端位移等仿真结果。仿真数据分析说明机器人运动过程平稳无冲击,各关节仿真结果均满足机器人允许最大工作范围,并且与给定原始条件一致,可以得出钱江一号焊接机器人三维图形运动仿真能够较好地反映出机器人实际运行情况的结论。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
19

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









