





马鞍型焊缝专用焊接机器人正、逆运动学求解
时间:2017-11-02
阅读:7630


马鞍型焊缝专用焊接机器人正、逆运动学求解
机器人D-H参数和D-H坐标系的建立
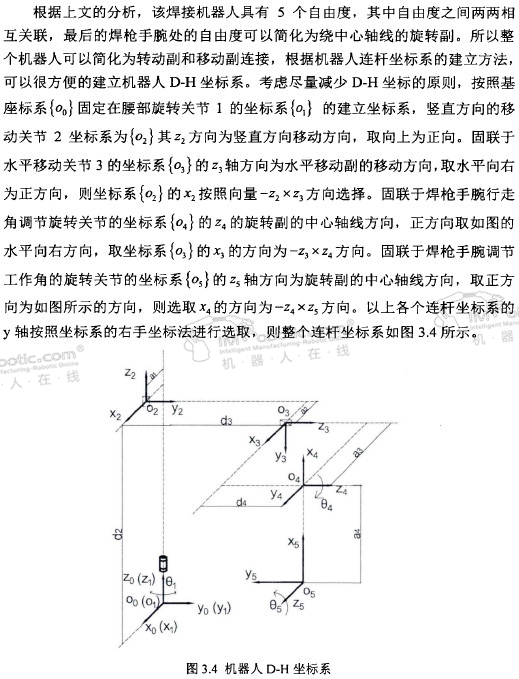
由机器人连杆坐标系得到整个焊接机器人的D-H坐标参数如表3.1所示:

运动学正问题求解
根据机器人连杆参数,根据式(3.13 )可以得到各个坐标系之间的变换关系,各个坐标系之间的变化关系如下:
.jpg)
假设在焊接过程中,机器人末端执行机构即焊枪端点相对于全局坐标系的位置
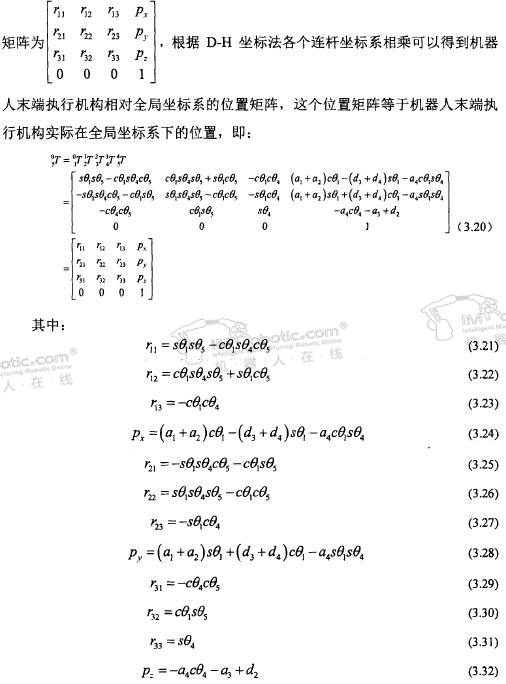
以上式(3.21)~(3.32)为焊接机器人的运动学正解方程,通过以上方程给定机器人各个运动关节的参数即可以求得机器人末端执行机构的末端位姿。
运动学逆问题求解
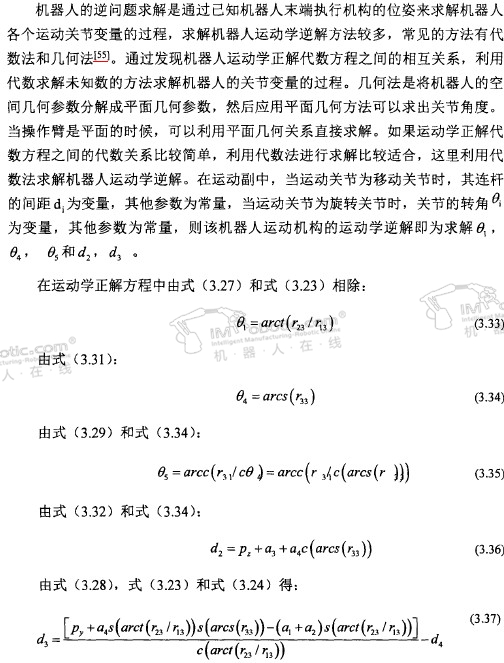
上式(3.33 )~(3.37)即为机器人的运动学逆解。
机器人的运动学问题求解主要包括机器人运动学正解的求解和运动学逆解的求解,机器人运动学正解的求解是通过己知的机器人各个运动关节参数求得机器人末端执行机构的位姿信息,相反的机器人运动学逆问题的求解则是通过己知的机器人末端执行机构的位姿信息求得机器人各个运动关节参数。
本章根据上文选定的机器人的机构方案,对该方案建立机器人连杆坐标系,通过连杆坐标系得到机器人的D-H参数,通过D-H坐标法求得机器人的运动学正解,在此基础上利用代数方法求得机器人运动学逆解。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
0

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









