





马鞍型焊缝焊接机器人传动方案设计
时间:2017-11-02
阅读:8237


马鞍型焊缝焊接机器人传动方案设计
马鞍型焊缝是形状复杂的焊缝,在焊接过程中焊枪的姿态随着焊接位置的改变而不断变化,在焊接过程中对焊接工艺提出了较高的要求。能够很好的完成焊接任务的焊接机器人,必须拥有一套高效的控制系统,然而控制系统的设计通常取决于机器人的最终设计。确定了能够满足焊接任务的机构方案后,对机器人进行结构设计,需要考虑刚度、精度及平稳性。合理设计机器人使其满足开放性、实用性的要求。
传动方案确定
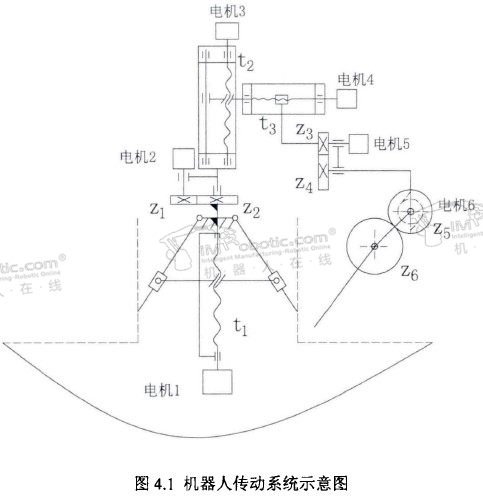
如图4.1所示,为马鞍型焊缝焊接机器人传动原理示意图,该焊接机器人共有6个电机,电机1驱动卡紧机构带动丝杆实现基座的卡紧,电机2通过带动齿轮传动实现腰部旋转,电机3通过丝杆传动带动实现竖直移动,电机4通过
丝杆传动实现焊枪的水平移动,电机5和电机6通过带动弧形齿轮传动实现焊枪工作角和行走角的调节。
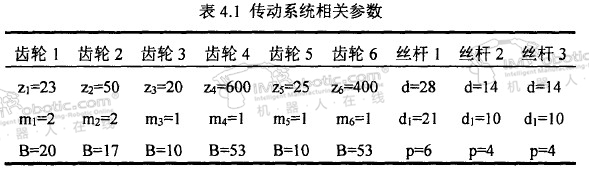
由于马鞍型焊缝焊接机器人焊接过程中速度较慢,且焊接过程中为匀速焊接,工作中对齿轮和丝杆的冲击较小、设计要求低,根据机器人的尺寸给定齿轮和丝杆的具体参数如表4.1

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-07-05
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11









