





马鞍型焊缝焊接机器人的驱动方式
时间:2017-11-02
阅读:7930


马鞍型焊缝焊接机器人的驱动方式
一般的,机器人的动力驱动方式存在气动、液动、电动三类。
电动驱动方式由于其控制精度较高,常常应用于工业机器人的动力驱动。
常见的控制电机有步进电机、直流伺服电机和交流伺服电机等。
1.步进电机
步进电机的原理是将数字脉冲转换为角度和直线位置上的位移变化,其特点是:无普通电机所具有的过载保护能力,随着转速的增加转矩会减少,所以功率偏大电机的体积较大:步进电机的工作原理决定其拥有很好的控制性能,由于步进电机输出的步数往往和输入的脉冲数保持步调上的一致,这一性能使其拥有很好的控制性能;由于步进电机拥有变磁阻式和永磁式两种性能,这使得步进电机具有控制系统的定位能力;可以直接实现数字控制,降低成本。
2.直流伺服电机
直流伺服电机具有输出的转速和输入的电压成正比的特点,且能实现正反向速度控制,其输入的电流和电压不会影响电机的输出的传动力矩;拥有较好的机械性能和调速性能,使得其控制变得非常方便,同时具备启动力矩的特点,上述特点使得其被广泛应用于工业机器人及数控机床设备上;但直流伺服电动机的结构复杂,成本较高,由于其存在电刷和换向器使得维护起来比较困难,影响了电机的可靠性。
3.交流伺服电机
交流伺服电机属于无电刷的电机,由于这一特点,相比于直流伺服电机有其自己的特点,不需要定期维护,提高了可靠性;由于没有电刷使得交流伺服电机拥有比较大的启动速度和工作速度,在高速和大力矩下仍有较好的性能;相同功率下比直流伺服电机体积更小,交流伺服电机由于克服了直流伺服电机的缺点,同时又拥有自己的优点,所以近年来直流伺服电机在越来越多的应用场合下被交流伺服电机所取代,但是交流伺服电机相比直流伺服电机成本高。
为了降低成本,卡紧机构丝杆传动、腰部旋转、竖直方向移动和水平方向的移动采用步进电机进行驱动,焊枪手腕结构上的焊枪工作角和行走角的控制采用伺服电机。
一、主要电机的选型
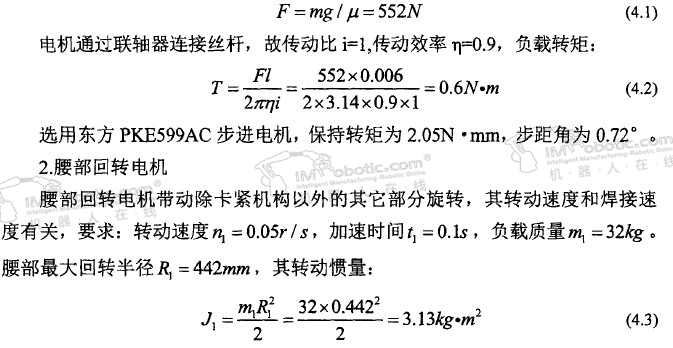
1.卡紧机构电机
该电机通过联轴器与丝杆连接,丝杆所受径向力F可通过支撑杆与支管内壁摩擦力求得,支撑杆与内壁接触为橡胶和钢接触,摩擦系数w=0.8摩擦力大于等于机器人重量,机器人质量为m=45kg,径向力最大作用长度1=200mm,丝杆导程1=6mm。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









