





双目视觉焊接机器人系统实例组成简介
时间:2017-11-03
阅读:8731


双目视觉焊接机器人系统实例组成简介
1 机器人硬件系统
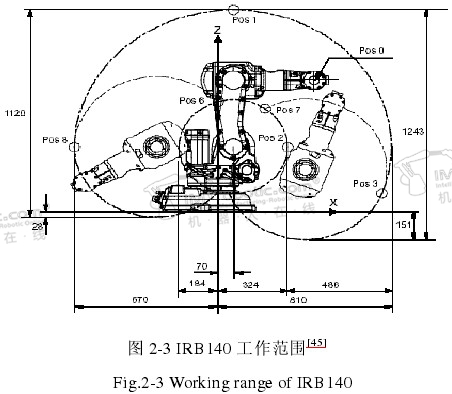
在搭建的波纹板焊缝三维检测及重建系统中,采用ABB公司的IRB 140型机器人携带双目立体视觉系统进行焊缝三维信息获取。IRB 140系统由机器人本体和机器人控制器S4Cplus组成。机器人关节的最大运动速度可达2.5m/s,重复定位精度0.03mm。机器人的本体是六个转轴组成的空间六杆开链机构,其工作范围如图2-3所示。
S4Cplus控制器由计算机系统、伺服系统、输入/输出系统、安全系统和外部轴控制系统构成,用于机器人本体、外部连接轴和外围接口设备的控制。机器人的计算机系统由主计算机板、轴计算机板、I/O计算机板组成。机器人的计算机系统是机器人功能实现的核心,程序的建立、存储、执行,机器人各轴运动控制,与其它模块、板卡、外部设备通讯都要通过它来实现。其中,IRB 140机器人输入/输出系统包括:示教操作板、工作操作板、软驱、面板单元、数字I/O板、模拟I/O板、通讯板、现场总线板等。输入/输出系统由主计算机和I/O计算机板管理,机器人可通过模拟信号、数字信号、串行通讯口或工业标准的现场总线与周围的过程设备进行通讯。
2 机器人系统软件及编程语言
ABB机器人采用BaseWare OS操作系统,它提供了几乎所有的机器人编程和操作的功能。在机器人系统中配置了高级功能函数“Advanced Functions”和处理多任务的"Multitasking"o "Advanced Functions”为给机器人系统增加如下功能:
(1)通过串口传送信息;
(2)在给定的位置设置输出,如在机器人作点对点直线运动,两点之间某个位置
产生一个输出信号;
(3)在给定的位置执行一个子程序;
(4)陷阱例程中的机器人运动;
(5)模拟输入输出的中断响应等。
"Multitasking”可以实现机器人多任务编程。比如建立并行的前后台任务,设置后台任务进行机器人与外界实时数据交换,前台任务执行机器人运动指令。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
15

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









