





激光双目视觉焊接机器人传感系统介绍
时间:2017-11-03
阅读:9576


激光双目视觉焊接机器人传感系统介绍
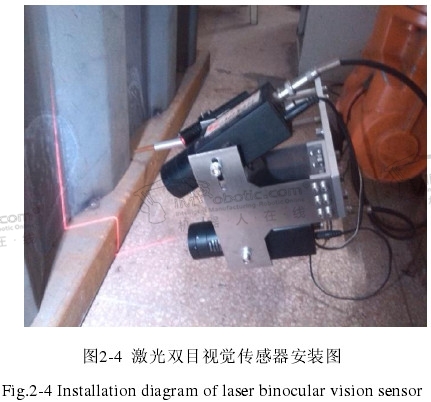
激光结构光测量系统由于波长单一,抗干扰能力强,检测精度高等优点,在焊接领域被广泛应用于焊缝的检测。本文采用的激光结构光立体视觉测量系统由安装在焊接机器人末端的激光器、两台CCD摄像机构成。激光器是可调一字线半导体激光器,红色连续激光,输出波长63_Snm。视觉传感器采用敏通MTV-1881EX,该传感器分辨率为768*576。镜头与摄像机之间采用CS-Mount形式。工作时激光器以一定的角度发出波长为 635mm的红色激光,经过柱型透镜后,形成条纹投影到激光视觉传感器下面的工件表面,由CCD摄像机直接拍摄传感器下方的条纹。摄像机拍摄的图像大小为640*480像素。传感系统的总体设计实物图如图2-4所示,自主设计的视觉传感装置可以实现两摄像机基线位置大小以及夹角大小的调整,以适应双目视觉采集精度的要求。
主控计算机系统
主控计算机是一台PIII的工业计算机,主要完成图像采集、图像处理及特征提取、任务的时序和逻辑控制、系统人机交互界面功能。在主控计算机上配置大恒DH-CG410图像采集卡和RS232串口,实现图像信息的数字化转换和与机器人控制器通讯的功能。如图2-_5所示为大恒DH-CG410图像采集卡,该卡提供Windows软件支持,可用VisualC++作为开发环境,并为用户提供了相应的软件开发包。这些功能包括:图像采集卡的启停控制、采集图像到屏幕或者内存的控制、数据传递、错误处理等。DH-CG410图像采集卡采用PCI总线,图像数据传输占用的CPU时间极少,并可将图像直接传送到计算机内存或显存,具有很高的使用灵活性而被广泛应用。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
11

- 最新资讯
- 最新问答
-
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17
-
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18









