





焊接机器人手眼标定实验
时间:2017-11-03
阅读:8785

焊接机器人手眼标定实验
在完成摄像机标定的基础上,结合机器人采集图像时的位姿参数,基于两步法的求解原理,求解手眼方程AX=XB。首先获得机器人的相对运动矩阵B,摄像机相对运动的矩阵A,按照手眼标定的步骤,编写Matlab程序求解手眼方程。在实际的操作过程中,并不能保证方程唯一解的条件,为此,在求解时要对齐次变换矩阵A进行判断,若A是单位矩阵,则无法确定旋转轴K;若A的旋转角θ为0°或者180°,则出现多解。机器人手眼标定方程的求解流程如图3-13所示。

本文所选择的ABB机器人,测量机器人的本体重复定位误差精度为0.03mm,对机器人相对运动矩阵B的结果影响较小。为减小手眼标定结果对噪声的敏感性,操作机器人时尽量使A的旋转角度尽量接近180°。其次,控制机器人执行器连续多次位姿变化,采集了多张图像,可以利用冗余的机器人动作,建立多个手眼方程,求解手眼关系,得到了多组的手眼标定结果。利用最小二乘拟合法求解最终结果X,其旋转和平移矩阵如见式(3-39), (3-40):
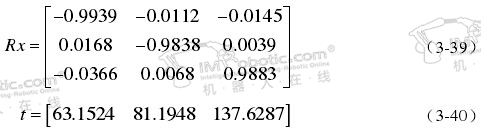
分析手眼标定以及求解手眼方程的理论方法可知,矩阵A的特点对于手眼标定结果的计算有着很大的影响。
本章节详细介绍了摄像机标定、双目立体视觉标定、机器人手眼关系标定的原理和方法。进一步分别利用摄像机标定工具箱和自己编写的标定程序进行了摄像机标定实验,双目视觉系统标定实验以及手眼关系标定实验,取得了较为理想的标定结果。详细探讨了摄像机标定过程中的畸变模型及其修正方法,阐述了机器人手眼标定的步骤以及误差控制的一般方法。该章节相关问题的讨论以及实验结果是波纹板焊缝三维信息采集的基础。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









