





PR1400焊接机器人路径规划问题描述与建模
时间:2017-11-06
阅读:8140

PR1400焊接机器人路径规划问题描述与建模
1 PR1400焊接机器人路径规划问题描述
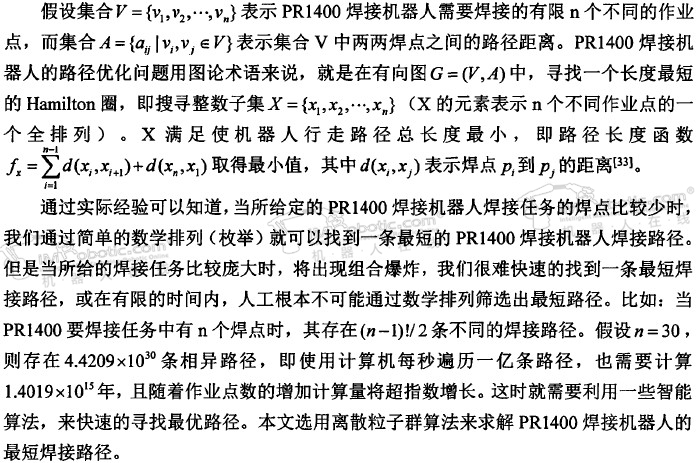
本文的PR1400焊接机器人路径规划,就是在PR 1400焊接机器人进行焊接作业之前,通过对焊接任务进行分析,在保证焊接所有焊点的情况下,不能有漏焊,更不能有重复焊,力求寻找到一条PR1400焊接机器人运行距离最短的焊接路径。通过对PR1400焊接路径问题的分析,可以把求解最短焊接路径这个问题,归类于组合优化问题。本文采用求解组合优化问题的算法,来进行PR 1400焊接机器人最优焊接路径的寻找。通过参阅有关文献,本文将PR1400焊接机器人最优焊接路径的求解类比于旅行商TSP(Traveling Salesman Problem)问题进行求解。通过采用求解TSP问题优异的算法,对PR 1400焊接路径进行优化,力求在众多潜在可行焊接路径中找出一条PR1400焊接机器人最短的焊接路径。
2数学建模
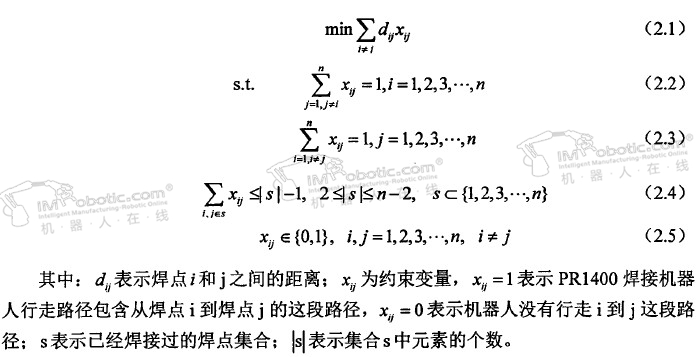
PR1400焊接机器人的路径优化问题可描述为:若需要焊接n个焊点,机器人从某个焊点出发焊接所有焊点后返回起始焊点。已知每个焊点的位置坐标,要求对焊接作业顺序进行合理规划,使得该机器人行走距离最短,并满足以下约束条件,
(1) PR1400焊接机器人以某焊点为起点和终点;
(2)每个焊点必须且只能焊接一次。
其数学模型表示如下:

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
12

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









