





焊接机器人齐次坐标变换
时间:2017-11-08
阅读:11706

PR1400焊接机器人齐次坐标变换
齐次坐标变换
1坐标的平移变换
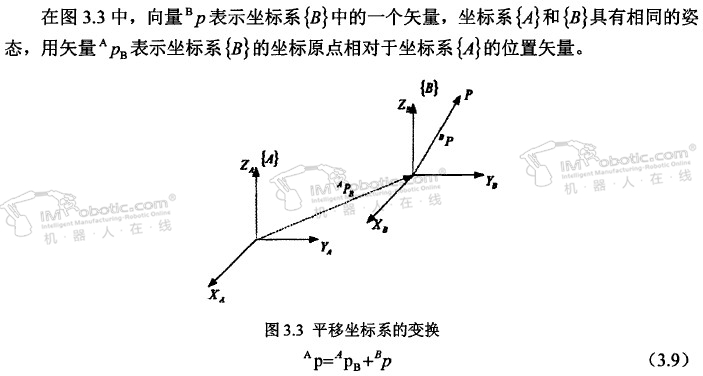
式(3.9)中,为了用两矢量相加的方法表示PR1400焊接机器人机械臂坐标的平移变化,必须满足两坐标系的姿态相同这个条件。
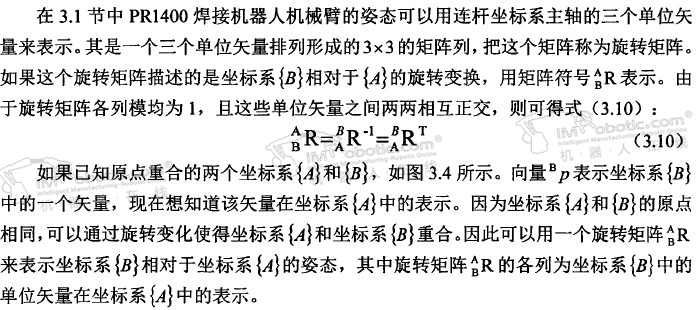
2坐标的旋转变换
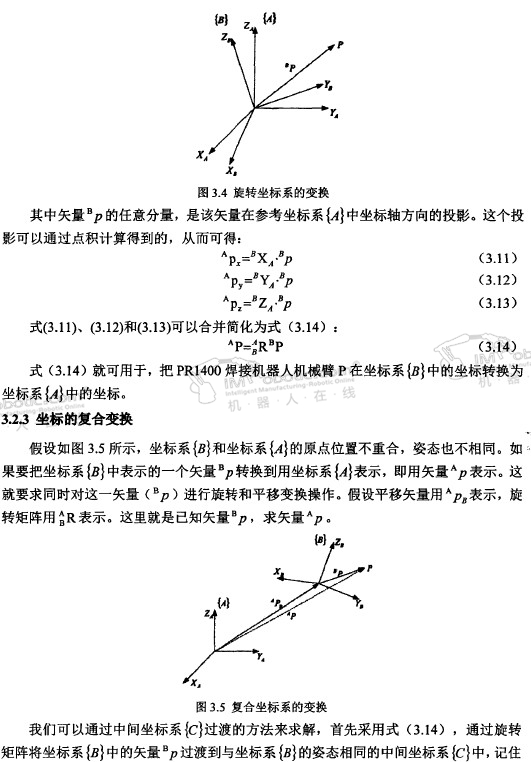
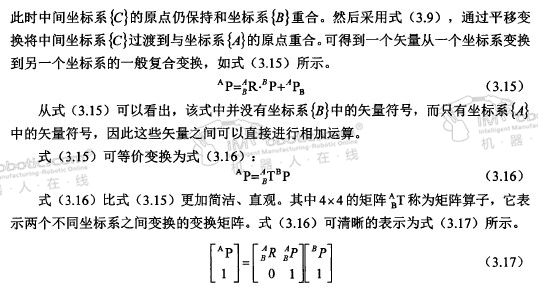
其中,式(3.17)中用一个简单的4×4的矩阵算子同事表示旋转和平移变换操作,把这个4×4矩阵成为齐次变换矩阵,这种变换方法成为其次变换法。本文将用这种方法表示PR1400焊接机器人连杆之间的坐标变换。
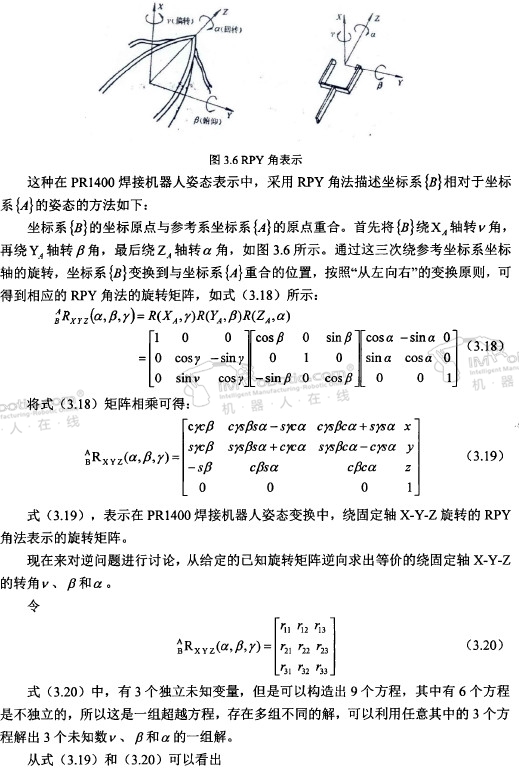
位姿的RPY角表示法
3.1节中我们共3×3的旋转矩阵表示RP1400焊接机器人机械臂的姿态。该旋转矩阵中有9个元素,其中满足6个正交约束条件,所以其中独立的元素只有3个。是否可以用这3个独立的参数简介的描述 PR1400焊接机器人机械臂的位置和姿态呢,如果可以在笛卡尔轨迹规划中,就可以通过控制这三个独立参数来进行轨迹规划,这样计算量会小的多了。通过查阅有关文献,这里引入位姿表示方法中的RPY角法,描述PR1400焊接机器人的姿态。当初提出RPY角姿态表示法,是为了表示船舶在海中的姿态的,如图3.6所示。这里用RPY角表示PR1400焊接机器人的姿态。

PR1400焊接机器人的D-H法建模
D-H法是由Denavit-Hartenberg于1955年提出的,它是一种描述机器人相邻连杆之间的相对位置,和相对运动关系的机器人建模方法。简单来说该方法是在已知机器人各结构参数的基础上,通过一系列的平移和旋转的变换,建立起机器人基座到末端执行器的总体变换关系。其表述形式为一个4x4的齐次变换矩阵,通过该矩阵就可以建立各关节之间的变换关系,进而建立机器人的运动学方程。
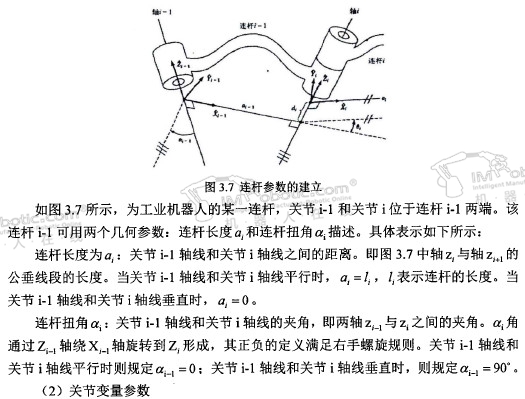
1机器人连杆参数和连杆坐标系
(1)连杆参数
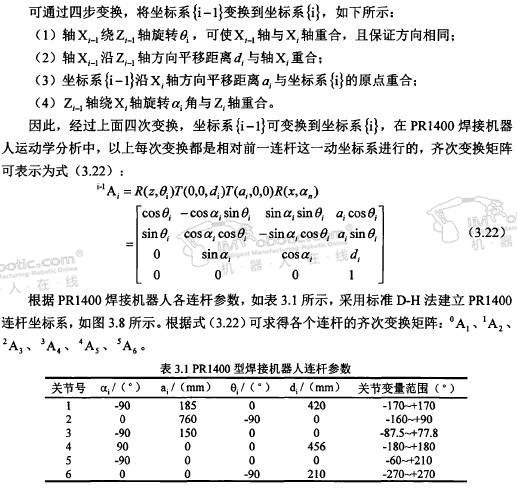
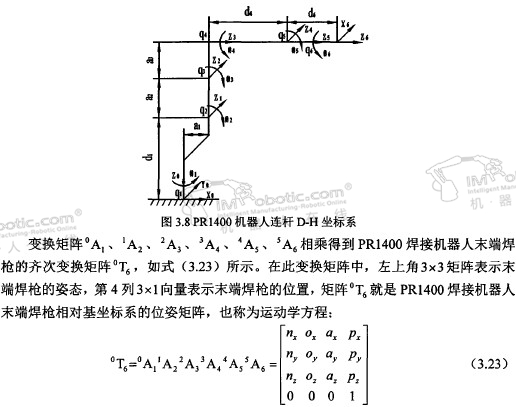
2 PR1400焊接机器人连杆变换和运动学方程

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
6

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









