





经济型焊接机器人发展趋势—焊接零部件生产
时间:2017-11-08
阅读:6718

5 研究的主要内容
在目前的生产模式中,车辆主机厂的大部分焊接零部件由下游企业配套生产,这些企业中,相当一部分仍使用比较传统的手工焊接工艺,这就致使其工作效率低下,加工出来的产品质量也不稳定。因此采用基于焊接机器人来从事焊接零部件生产的这种方式是未来机械行业必然的一种趋势。但由于市场常见的焊接机器人系统价格较高,中小型企业全面推广存在困难,针对具体生产对象,研究经济型机器人自动化焊接系统有较大的现实意义。本课题主要以生产车辆仪表板支架自动化焊接系统的经济型焊接机器人为研究对象,建立其实体模型与运动学方程;运用ANSYS,Matalb等软件进行相应的静力学、运动学分析与仿真,利用拓扑优化思想提出系统优化路径与方法;对改进后的焊接机器人进行静应力分析,得出应力及应变结果,验证理论分析与优化的正确性。具体内容由如1-1所示。
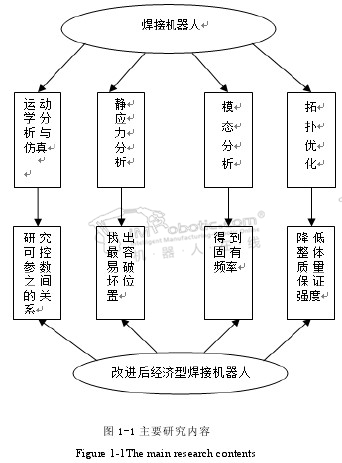
具体研究内容如下:
(1)了解焊接机器人的总体结构,分析各连杆之间的位置关系,利用Soildworks三维实体建模软件对其整体结构进行实体建模。
(2)要理解参考坐标系以及位置矢量等概念,应用理论D-H法建立坐标系并找出其主要的运动参数,运用解析法对机构进行分析推导出焊接机器人的运动学方程,并对其进行运动学正解进行求解,同时运用Matalb软件对焊接机器人各驱动力矩进行计算,对其运动的轨迹进行仿真分析,从而为今后的静力学方面的分析打下了坚实的基础。
(3)将焊接机器人的实体模型导入通过三维软件Soildworks中的无缝接口输入ANSYS Workbench工作平台当中,对其进整体结构进行静应力分析找出最危险工况时焊接机器人大臂是易破坏部位。
(4)在焊接机器人底盘处施加约束,对其强迫模态进行求解,提取了前七阶模态,获得了焊接机器人整体模型的动态特性,该结果可用于预防工作中共振问题,为今后的结构优化做铺垫。
(5)利用ANSYS Workbench工作平台来分析焊接机器人的大臂结构,并对其本体结构优化,通过这种拓扑优化的方法使经济型机器人焊接系统的关键部位结构得到优化其同时重量减轻,得到优化后的经济型机器人后还要运用有限元分析校核其构件强度。
本章主要阐述了焊接机器人在国内外的发展情况,对比了我国焊接机器人方面研究与其他先进国家之间的差距,从而明确了研究该课题的必要性与紧迫性。最后对本课题的研究内容的先后顺序安排进行了详细的说明,从而为研究方向和方法理清了思路。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
9

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









