





焊接机器人大臂、小臂的结构应力分析
时间:2017-11-09
阅读:11051

5焊接机器人大臂、小臂的结构应力分析
1焊接机器人大臂的结构应力分析
将焊接机器人的大臂结构的实体模型单独导入到有限元分析软件ANSYSWorkbench中,因为大臂结构比较复杂,所以我们仍然要通过SoildWorks与ANSYSWorkbench无缝连接接口进行导入分析,以求获得完整的数据。
(1)定义材料
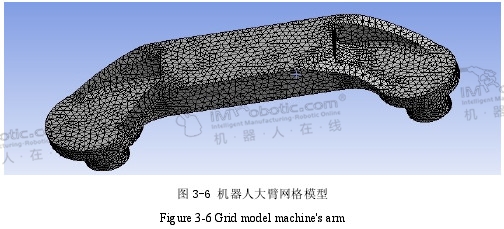
焊接机器人大臂材料的设定可以依据表3-2来进行。定义材料后单独对其大臂的有限元实体模型进行网格的划分,划分后如图3-6所示,划分后形成32297个单元,56957个节点。
(2)施加约束与载荷
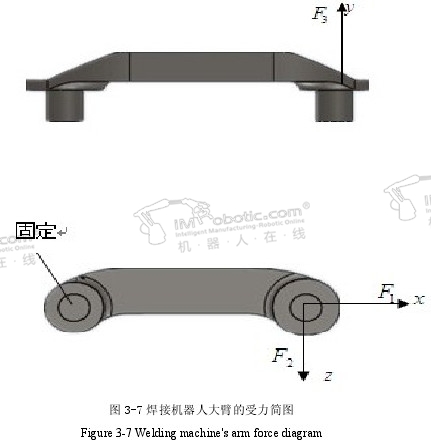
图3-7为焊接机器人大臂受力的两个视图,我们设定焊接机器人大臂一端的螺栓是固定的,在另外一段上面选择一个节点,分别设定:F1=50N, F2=800N, F3=300N.
其中:
F1——回转时所有运动部件产生的向心力
F2——整个运动部件的重量与加减速时产生的惯性力
F3——回转运动产生的力
(3)结构应力分析
对焊接机器人的大臂的进行辩解条件的设置后,设置施加的力矩,完成以上两个步骤就可以对机器人的大臂进行静应力分析了,静应力分析后获得大臂应变及应力云图,如果3-8所示。
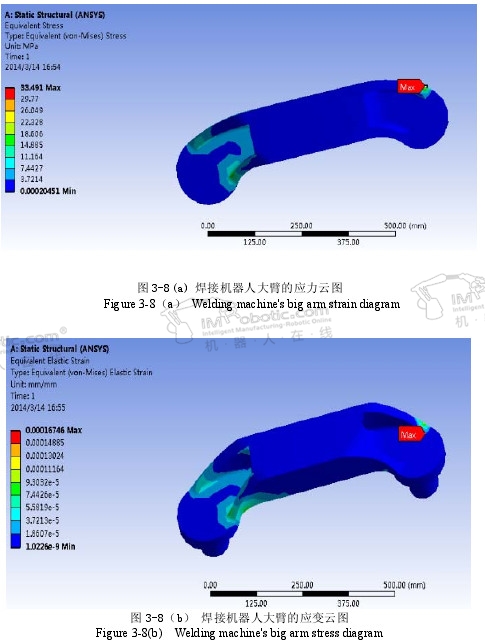
从焊接机器人大臂的应力、应变云图上我们得出焊接机器人大臂的最大应力值为33. 491MPa,小于我们所选材料的屈服极限,同时焊接机器人大臂的变形量也在重复定位精度相关规定的范围内,由此证明焊接机器人的大臂强度是符合要求的。
根据焊接机器人大臂上述的分析方法,我们可以得出相应的小臂的应力、应变云图如图3-9所示。
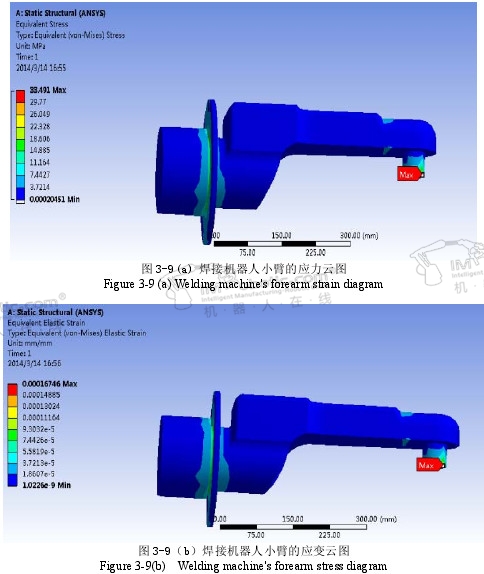
通过大臂、小臂的应力及应变云图结合实际生产经验可以看出其变形主要在大臂的关节处,因此我们可以针对大臂进行优化设计。
本章主要对焊接机器人的整体结构、大臂、小臂分别进行了静应力分析。首先通过SoildWorks与ANSYS无缝连接接口直接将焊接机器人整体的CAD模型导入ANSYSWorkbench中,然后对焊接机器人模型进行材料定义、网格划分、施加约束与载荷,最终得到焊接机器人整体的应力、应变云图,对各部件强度和局部刚度进行了评价,因而得知大臂与小臂是焊接机器人在最危险工况时较为容易发生应变的部位,在对焊接机器人本体结构优化设计时应先考虑对其大臂与小臂的结构进行优化。
通过有限元分析结果表明:该机器人的整体结构、大臂、小臂等部件的强度是远小于各材料的屈服强度的,因此可知焊接机器人各部件的刚度是符合标准的,但由于大臂的刚度结果有些略低,而且焊接机器人大臂的刚度对其运动精度有着关键性的影响,所以这就需要通过改进它的结构来提高刚度,鉴于以上的因素,我们不能得知:在进行焊接机器人的结构设计时最好是要以保证机器人刚度要求为设计准则,进而提高其运动精度。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









