





焊接机器人ADAMS模型建立方法
时间:2017-11-10
阅读:13533

焊接机器人ADAMS模型建立方法
ADAMS作为一种通用的虚拟样机仿真软件是从系统方面进行机构的运动仿真、动力学仿真。在建立系统模型时,ADAMS提供了两种方法:一种是利用ADAMS软件中的建模模块建立机械系统模型,这种方式虽然能够进行参数化的分析,但是由于建模功能有限,无法准确建立复杂的机械系统;第二种是由第三方三维软件建模,如SolidWorks, UG, PROE等,然后将模型存为通用格式文件导入ADAMS,缺点是不能对系统进行参数化设计。
由于PR 1400型焊接机器人的模型较为复杂,本文选取第二种方法,主要步骤如下所示:
(1)简化模型
在导入ADAMS软件前,为了避免因为零件众多而产生过约束问题,增大仿真难度,有必要进行模型简化。简化主要内容:
①将部件视为刚体。
②忽略螺钉、垫片等对动力学仿真影响极小的零件。
③对于轴承等运动过程中始终电机固连的零件,直接将轴承质量施加在电机上,省去轴承建模。
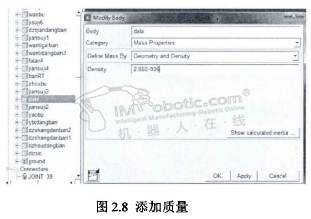
(2)导入模型
在存为通用格式导入ADAMS后,需要检查零件质量特征是否缺失。对于质量缺失的零件需要重新赋予质量特征,如图2.8所示。同时为了方便后续约束的添加,将各部件名称进行重新命名。
(3)添加约束与驱动
在ADAMS/View模块中约束定义了构件(刚体、柔性体和点质量)间的连接方式和相对运动方式。具有理想约束(固定副、旋转副等)、虚约束、运动产生器、接触限制等丰富的约束类型。在PR1400焊接机器人模型中主要有以下约束类型
①固定副。固定副是固连构件的约束副,主要包括两种类型:一种是零件与地面的固连,在PR 1400机器人模型中,腰座与地面便是添加固定副;第二种是用于将两个没有相对变化的零件固连,达到简化模型的目的。
②旋转副。旋转副是添加在两个旋转构件之间的约束副。在施加旋转副时,应注意连接方向的选取,其决定了构件旋转轴的方向。
ADAMS/View中工具箱中各种约束图标如图2.9所示,PR1400焊接机器人全部构件连接好后的所有约束如图2.9所示。

给机器人模型添加约束时,应注意以下方面:
①由于约束众多,且约束类型复杂,应该不断检验约束是否添加正确,而不是等到全部添加完成再做修改。
②添加旋转副等运动约束时,构件的选取具有一定的顺序,ADAMS/View默认相互连接的构件,构件1连接在构件2上。
③注意约束添加方向的选取。约束方向的错误选取会导致欠约束或过约束。
PR 1400焊接机器人有六个旋转自由度,分别为肩部的转动、大臂的俯仰、肘部上下摆动、小臂的旋转、腕部的上下摆动、末端执行部件的旋转。故需要添加6个旋转驱动。
(4)添加模型受力
PR 1400主要受零件自身重力与末端负载,通过添加重力加速度9.8m /s2来实现。其中末端载荷质量为6Kg。
(5)验证模型
在整个模型建立后利用ADAMS提供的Model Verify对其进行检验,查看是否有过约束等存在。如1纠2.10所示为检验结果:


机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25 -
机器人打磨抛光设备有哪些?特点是什么?
关键字: 机器人打磨 抛光 特点 2024-06-20 -
什么是SLAM技术?应用领域有哪些?
关键字: slam技术 应用领域 2024-06-19
-
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05 -
3d相机机器视觉检测原理
标签: 3D相机,视觉检测 提问:木木 2024-06-17 13:03:03 -
安川机器人驱动器如何设置参数?
标签: 安川机器人,驱动器,设置参数 提问:先知 2024-06-13 10:15:03

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11
- 2024-06-06
- 2024-06-04









