





管道焊接机器人运动系统组成
时间:2017-11-22
阅读:9394

管道焊接机器人运动系统组成
焊接机器人的应用对象在一定程度上决定了机器人的自由度、坐标形式和传动机构的类型。运动系统设计是否简单并且易于建模常常决定了焊接机器人运动控制的难易程度。运动系统的设计不仅需要满足相贯线焊接要求,还需要考虑其驱动方式、机器人刚度、重复定位精度、分辨率和平稳性等多方面要求
由图2-1可知,相贯线焊缝为空间回转曲线,机器人在进行相贯线缝焊接时需要围绕支管进行连续回转运动,与此同时焊枪在沿支管轴向方向还需要进行升降运动,升降运动的相对值通常叫做马鞍落差或马鞍量。相贯线运动可以看成是在支管径向上的圆周运动与支管轴向方向上升降运动的合成。表2-1所示数据为焊接机器人的工作指标。机器人的运动系统设计必须满足全部指标的要求。
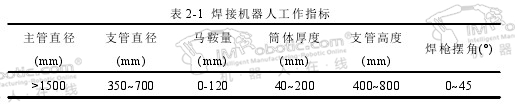
图2-3所示为运动系统结构简图。主要分为回转主轴(以下简称1轴)、水平轴(以下简称2轴)、竖直轴(以下简称3轴)和枪角调整轴(以下简称4轴)共四个轴,分别对应主轴的连续回转运动,沿主轴径向方向的水平移动,沿主轴轴向方向的升降运动,以及调节焊枪夹角运动四个自由度。通过机器人四个轴的有序配合即可行走出相贯线轨迹。
.jpg)
回转主轴的设计
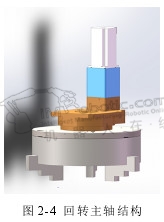
回转主轴采用较大减速比的减速器配以伺服电机,电机高速旋转带动减速器转动。减速器减速比为1000:1,依靠减速器的机械精度和大的减速比,可以使主轴达到很高的回转精度。图2-4为回转主轴结构示意图。
减速器和下端的三爪卡盘进行连接,卡盘的作用是和待焊支管进行装配,卡盘的型号范围依据支管管径范围确定。主轴减速器作为连接运动机构与卡盘之间的受力部件以及承接上部设备的承重部件,其受力主要来源于:(1) 承载机器人的全部重量; (2)机器人回转时由于偏心而产生的扭力; (3)机器人起吊时卡盘的拉力。
水平及竖直轴的设计
为了适应不同直径和高度支管的相贯线焊缝空间运动,采用两个滚珠丝杆组合为十字滑架,这样便能满足焊枪沿主轴径向方向和轴向方向的直线运动,其示意图如图2-5所示。十字滑架的长度根据机器人管径范围指标和实际情况确定。本文中的十字滑架采用螺距4mm的铝合金滚珠丝杠滑台,滚珠丝杠的精度等级为P7(0.05mm )。采用的铝合金型材能够减轻整套系统的重量。经校核,横梁末端在承重50KG的情况下弯曲小于0.05mm,满足精度要求。

2.2.3焊枪回转轴的设计
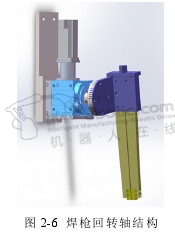
焊接过程不仅要求焊枪末端到达特定的位置,还需要焊枪以适当的姿态指向焊缝,一般弧焊需要焊枪垂直于焊缝或者与焊接方向构成一定角度以满足焊接工艺的要求,埋弧焊的熔滴过渡形式为渣壁过渡,熔滴沿着熔渣壁流入熔池,因此考虑到埋弧焊的特性,只需调整焊枪与主轴方向的夹角。焊枪回转轴结构设计如图2-6所示。其中减速器采用铝合金蜗轮减速机,减速比为60:1,蜗轮配合紧密,精度较高,采用铝合金材质在保证减速机的强度前提下减轻了末端的总重量。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
7

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00
推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









