





管道焊接机器人控制系统简介
时间:2017-11-22
阅读:8615

管道焊接机器人控制系统简介
控制系统主要负责接收各传感器的反馈信息,控制焊接机器人各轴的运动以及协调焊接电源工作。本文中的控制系统主要分为运动控制器、伺服驱动器、控制面板等几个主要部分。
运动控制器的选择
本文中的运动控制器采用固高GUC-T系列四轴运控控制器,该控制器具有优越的性能和丰富的运动控制功能,特别适应各种高精度的控制场合。图2-7所示为GUC-T系列运动控制器实物图。

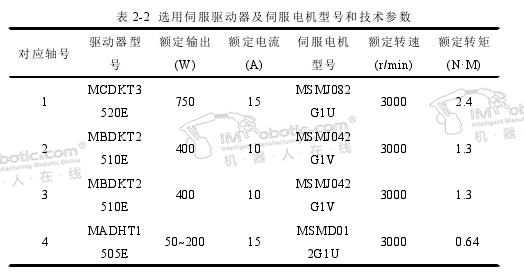
伺服驱动器的选择
伺服驱动器用来控制伺服电机,不同驱动器需要和对应的伺服电机搭配使用。本文选用的伺服驱动器是松下Panasonic公司生产的产品,表2-2为所选用的伺服驱动器及伺服电机型号和技术参数。
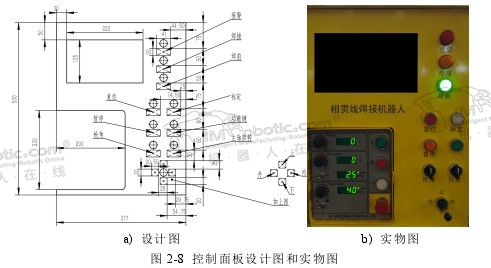
控制面板设计
控制箱面板作为机器人的人机交互的界面,不仅需要体现焊接机器人的全部功能,还要提供良好的用户界面以提高操作人员的操作效率。根据相贯线焊接机器人控制系统的功能,设计出控制箱面板形式如图2-8所示。
焊接系统
焊接系统主要包括焊接电源、导电滑环、送丝系统和焊枪四部分。
焊接电源采用伊萨ESAB LAF631型直流焊接电源,可以进行埋弧焊或者气保焊。在63 0 A/44 V下暂载率为100%。
相贯线焊接机器人在焊接过程中主轴需要作连续回转运动,而焊接线、控制箱信号线不能无限制旋转,这就需要导电滑环作为中间连接部件,使得机器人的回转运动能够连续进行。导电滑环又称集电环、导电环,是实现两个相对转动机构的信号及电流传递的精密输电装置。导电滑环分为强电导电滑环和弱电导电滑环,由于本文中的机器人无需传输中高频的电信号,所以采用弱电低频滑环。导电滑环的装配图和剖视图如图2-9所示。
送丝机安装位置如图2-2 a)所示,送丝机后部连接丝盘,通过导丝管将焊丝送至焊枪处。由于埋弧焊电流较大,焊接导线单独从导电滑环接至焊枪处,这样可以保证焊丝平稳输送,并且在大电流下长时间焊接也不会出现导线发热的情况。
在某些焊接环境,如锅炉汽包焊接中,相贯线焊缝坡口较窄,为了使焊枪能够深入到焊缝底部,需要将其设计成扁平状,如图2-6所示。


机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









