





管道焊接机器人软件总体结构设计
时间:2017-11-22
阅读:6767

管道焊接机器人软件总体结构设计
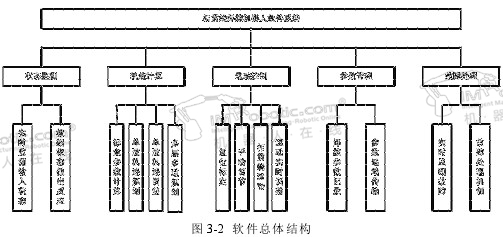
根据控制系统的要求,软件应该主要具备如下功能:时刻监测输入端口状态,对相应操作做出反应;对相贯线多层多道焊焊接轨迹进行规划,并根据实际工况进行调整;对固高运动控制器发出运动指令控制焊接机器人运动;对焊接中的焊接参数进行管理和上传;对系统运动中和焊接中的故障做出及时的判断和处理。软件总体结构如图3-2所示。
软件主要功能模块和具体实现
如图3-2所示,本文的软件系统采用了模块化的编程思想,将程序分为多个不同的模块编写,每个模块对应一个C++类,这样在使用到程序某个功能时,只需调用相应的类即可。这样能够使程序调理清晰,易于管理和编写。根据对软件总体结构的分析,将软件的主体功能分为状态监测模块、轨迹计算模块、运动控制模块、数据管理模块、故障处理模块等五部分。下面分别介绍各个模块的主要功能和具体实现。
状态监测模块
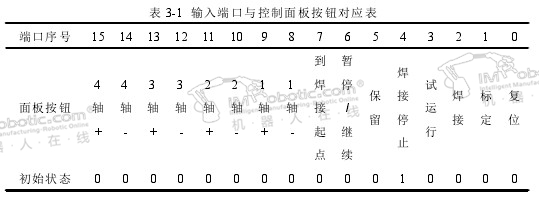
本文中设计的相贯线焊接机器人主要通过机器人控制箱上的控制面板实现人机交互,操作人员通过按下控制面板上不同的按钮来实现不同的功能。这就需要软件实时监测外来的输入信息以做出相应的判断,进而实现不同的操作。固高GUC-T系列运动控制器提供了16路通用输入端口,用来接收外来输入信号。根据程序的需要,将输入端口与控制面板上的按钮一一对应,如表3-1所示。
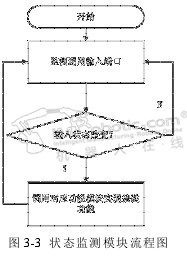
实时监测模块功能的实现过程如下:设置一个定时器OnTimer,每隔100ms监测一次通用输入端口状态,如果初始状态改变,则调用相应端口上的程序来响应这次输入;如果初始状态未改变,则继续进行监测。模块流程图如图3-3所示。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
10

- 最新资讯
- 最新问答
-
单轴机器人工作原理及结构
关键字: 单轴机器人 工作原理 结构 2024-09-27 -
发那科机器人多少钱一台?有什么优势?
关键字: 发那科机器人 多少钱 2024-09-26 -
发那科搬运机器人多少钱?有什么优势?
关键字: 发那科 机器人 多少钱 2024-09-23 -
复合机器人品牌有哪些?产品及特点
关键字: 复合机器人 产品特点 2024-09-20 -
机器人结构组成及功能
关键字: 机器人结构 组成 2024-09-18
-
amr机器人是什么意思
标签: amr机器人,什么意思 提问:HYN 2024-09-18 11:16:05 -
上海视觉设备厂家有哪些?
标签: 视觉设备,视觉设备厂家 提问:GIGI 2024-09-13 10:16:02 -
搬运机器人多少钱一台?
标签: 搬运机器人,多少钱 提问:小仙 2024-09-10 11:28:02 -
配天机器人价格怎么样?
标签: 配天,机器人,价格 提问:SOSO 2024-09-09 10:48:02 -
场景感知技术包括哪些
标签: 场景感知,技术 提问:YUMI 2024-09-03 10:30:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-09-27
- 2024-09-26
- 2024-09-23
- 2024-09-20
- 2024-09-18
- 2024-09-14
- 2024-09-14
- 2024-09-14
- 2024-09-12
- 2024-09-11









