





管道焊接机器人软件系统开发
时间:2017-11-22
阅读:6783

管道焊接机器人软件系统开发
系统平台的选择
基于PC机的价格低、软硬件资源丰富等特点,它在工业领域的作用己经逐渐被认可。工业PC机与传统工业控制系统相比具有可靠性高、实时性好、扩充性和兼容性强等诸多优点,在一些场合下己经取代了传统工控机而成为了主要的控制系统。相贯线焊接机器人控制系统是一个实时的计算机控制系统,运动控制、数据管理等主要功能对实时性的要求都很高;同时考虑到控制现场的工作环境复杂,控制系统的稳定性也是考虑的主要因素之一,所以选择工业PC机作为相贯线焊接机器人控制系统的主要控制设备。
工业PC的系统平台目前主要为微软公司的嵌入式WindowsCE系统平台 (以下简称WinCE系统),该平台具有系统内核小、占用系统资源少、启动速度快、可定制能力强等诸多优点。但是它在硬件的扩展性方面存在一定的缺陷,导致在控制系统中添加硬件的过程繁琐。同时在软件调试的过程中WinCE系统与其他系统平台相比操作界面不够人性化,这会给编程带来很多不必要的麻烦。Windows XP Embedded操作系统(以下简称XPE系统)是微软公司在WinCE系统的基础上,结合WindowsXP系统开发出的嵌入式系统平台。XPE系统在继承了WinCE系统诸多优点的基础上,在系统兼容性和可操作性方面都做了一定的完善,使系统更加友好和人性化。因此选择XPE系统为相贯线焊接机器人控制系统的主要操作系统。
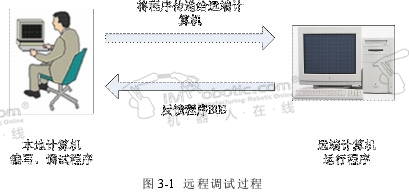
本文的软件系统是采用Visual Studio2008作为软件系统的开发平台,以C++作为程序设计语言,以MFC程序开发框架作为基础,以远程调试作为调试手段开发出来的。MFC程序框架内部封装了大量的WindowsAPI,从而大大缩短了程序开发流程,减少了程序开发人员的工作量,同时MFC的界面简洁易懂,适合工控领域软件程序的应用环境。如图3-1所示,远程调试即在本地计算机上进行软件的编写,然后通过局域网络将程序传递给目标计算机进行调试的方法。调试过程中以工控PC机为目标计算机,而工控PC机的存储空间一般较小,这种调试方法的好处就在于不必在目标计算机上安装编程软件,调试和修改工作都在本地计算机上进行,从而大大节省了目标计算机的存储空间。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
埃斯顿机器人系列有哪些?怎么样?
关键字: 埃斯顿 埃斯顿机器人 系列 2024-07-05 -
轮式机器人的发展及其趋势
关键字: 轮式机器人 发展 趋势 2024-07-03 -
具身智能的定义和作用
关键字: 具身智能 2024-06-28 -
什么是agv小车?特点有哪些?
关键字: agv小车 特点 2024-06-27 -
机器视觉应用的分类?范围有哪些?
关键字: 机器视觉 应用分类 范围 2024-06-25
-
工业机器人技术是干什么的?
标签: 工业机器人,技术 提问:小杰 2024-07-03 13:03:15 -
机器人焊接焊机报TC异常怎么解决
标签: 焊接机器人,焊机,TC异常 提问:TC 2024-06-28 16:05:01 -
机器人运动轨迹的控制方式有哪两种
标签: 机器人,运动轨迹,控制方式 提问:张默 2024-06-25 10:10:02 -
具身智能什么意思
标签: 具身智能,什么意思 提问:MESSE 2024-06-19 10:37:04 -
3D视觉无序抓取系统配置要点?
标签: 3D视觉,无序抓取,系统配置 提问:QUTE 2024-06-17 13:17:05

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2024-07-05
- 2024-07-03
- 2024-06-28
- 2024-06-27
- 2024-06-25
- 2024-06-20
- 2024-06-19
- 2024-06-17
- 2024-06-13
- 2024-06-11









