




焊接机器人焊缝视觉识别特征信息提取
时间:2017-11-24
阅读:8158

焊接机器人焊缝视觉识别特征信息提取
Hough变换
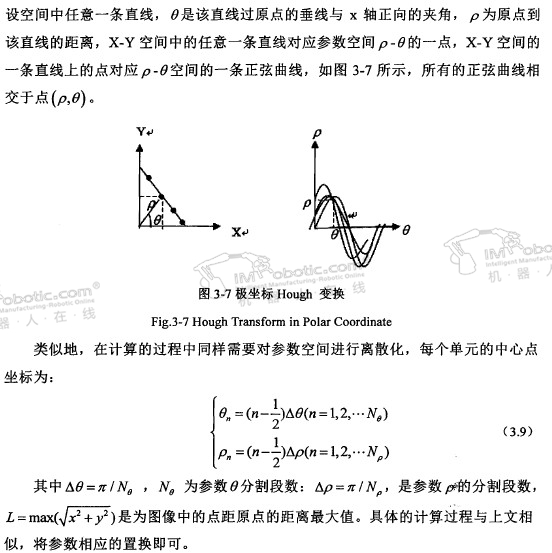
经过图像滤波和边缘检测之后,需要对焊缝的特征信息进行提取。Hough变换作为目标形状特征提取的有效方法得到了广泛的应用。Hough变换的基本思想是利用点——线的对偶性,即图像空间共线的点对应在参数空间里相交的线,反过来,在参数空间中交与同一个点的所有直线在图像空间里都有贡献的点与之对应。
在直角坐标系中,经过点同一点(x ,y)的直线都可以用式(3.5)所示的方程来表示。
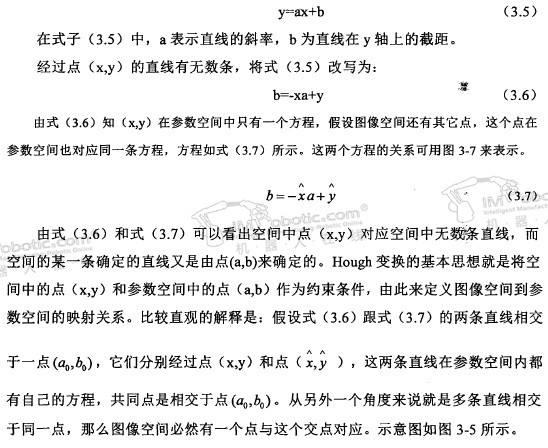
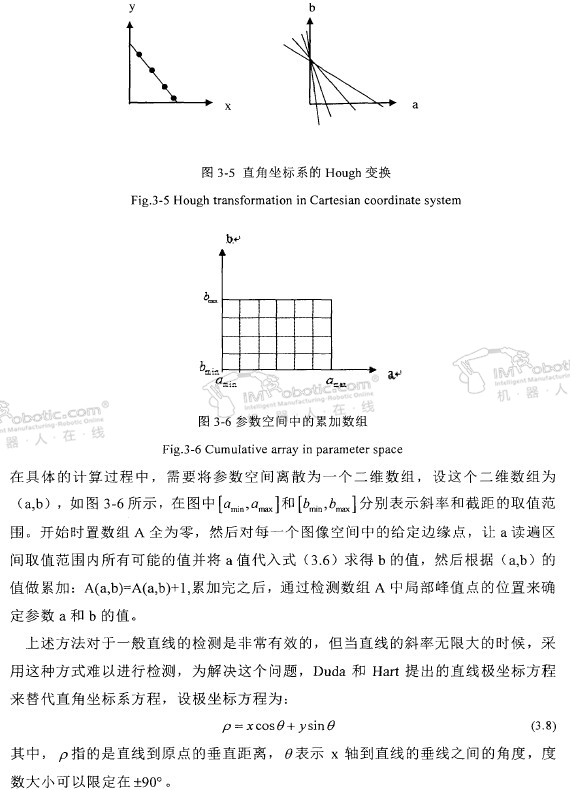
利用Hough变换在图像中检测直线的基本策略就是:由图像空间中的边缘点去计算参数空间中的参考点的可能轨迹,并在一个累加器中给出计算的参考点计数,最后选出峰值。Hough变换实质上是一种投票机制,对参数空间中的离散点进行投票,若投票值超过某一门限值,则认为有足够多的图像点位于该参数点所决定的直线上。
焊接路径中心线及其坐标提取
如果焊接路径是简单的直线时,提取焊接中心线较为简单,首先利用Hough变换得到焊接路径上下边缘的直线方程:
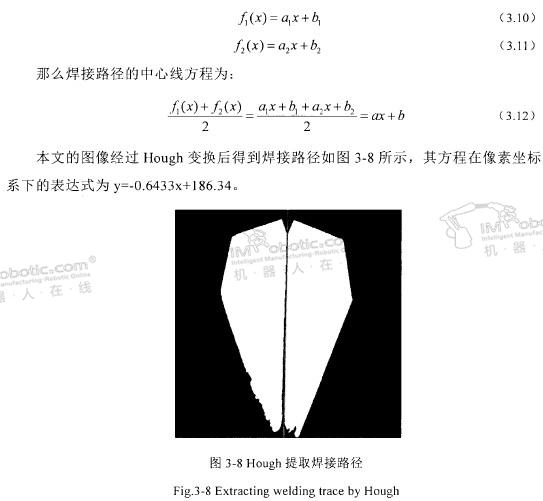
设置图像坐标系后,选取0.5mm的步长,对焊接路径上的坐标进行提取。得到焊接路径的图像坐标后,根据第二章介绍的图像坐标与摄像机坐标系下的坐标的转换关系,将其转化为摄像机坐标系下的坐标,再由手眼关系转化为控制焊接机器人准确进行焊接的位置信息。
Hough变换对于直线焊接路径的提取是非常有效的,但对于曲线焊缝,Hough换消耗的时间和内存是难以接受的。通常焊接路径并不是一条简单的直线,对于曲线焊接路径,最一般的手段是通过处理得到焊接路径上的一些特征点,然后对其进行拟合,得到曲线的拟合方程,最后提取焊接路径在机器人基座标系下的坐标。
本章对采集的焊接路径图像进行处理后,得到焊接路径的起始点信息,通过对焊接路径进行拟合,得到焊接路径的直线方程,从而确定了焊接路径的走向。整个算法的实现过程方便直观,处理精度高,鲁棒性好。主要的内容如下:
1,对图像进行预处理,包括图像的滤波、增强、二值化等,采用Canny边缘检测算法对图像的边缘进行提取,得到清晰的边缘图像;
2.采用Hough变换算法获取焊接路径的直线方程,得到焊接路径起始点的像素坐标,并确定焊接路径的走向,为实现焊接过程的自主示教奠定基础。

机器人
焊接机器人
技术干货

好的文章,需要您的鼓励
5

- 最新资讯
- 最新问答
-
协作焊接机器人有哪些特点?优势是什么?
关键字: 协作机器人 焊接机器人 2025-08-13 -
工业机器人码垛工作站怎么布局?有哪些组成设备?
关键字: 码垛机器人 码垛工作站 工业机器人 2025-06-25 -
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24
-
焊接机器人系统组成有哪些?
标签: 焊接机器人,机器人系统 提问:李子 2025-07-24 14:02:05 -
高精度压力传感器关键技术有哪些?
标签: 压力传感器,传感器,鑫精诚传感器 提问:小王 2025-07-03 17:01:05 -
智能焊接机器人的优势有哪些?
标签: 焊接机器人,工业机器人,配天机器人 提问:小王 2025-06-04 14:03:04 -
自动装卸货机器人的组成部分有哪些?
标签: 赛那德机器人,装卸货机器人,赛那德 提问:李子 2025-05-28 11:03:03 -
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00

推荐

相关资讯
相关问答
- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-03-22 15:42:15
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
栏目推荐
- 2025-08-13
- 2025-06-25
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19









